ລະບົບສົ່ງກຳລັງເກຍໜອນປະກອບດ້ວຍໜອນ ແລະ ລໍ້ໜອນ, ແລະ ໂດຍທົ່ວໄປແລ້ວໜອນແມ່ນສ່ວນທີ່ມີການເຄື່ອນໄຫວ. ເກຍໜອນມີເກຍຂວາ ແລະ ຊ້າຍຄືກັນ, ເຊິ່ງເອີ້ນວ່າເກຍໜອນຂວາ ແລະ ຊ້າຍຕາມລຳດັບ. ໜອນແມ່ນເກຍທີ່ມີແຂ້ວກ້ຽວວຽນໜຶ່ງ ຫຼື ຫຼາຍແຂ້ວທີ່ປະສານກັບລໍ້ໜອນເພື່ອສ້າງເປັນຄູ່ເກຍເພົາທີ່ຊ້ອນກັນ. ໜ້າດິນດັດສາມາດເປັນຮູບຊົງກະບອກ, ຮູບຈວຍ ຫຼື ຮູບວົງມົນ, ແລະ ມີໜອນ Archimedes ສີ່ປະເພດຄື: ໜອນ Archimedes, ໜອນ involute, ໜອນຮູບຊົງກົງປົກກະຕິ, ແລະ ໜອນຮູບຊົງກະບອກຮູບຊົງຈວຍ.
ຂໍ້ດີຂອງລະບົບສາຍສົ່ງເກຍໜອນ.
✦ ອັດຕາສ່ວນການສົ່ງຜ່ານຂັ້ນຕອນດຽວແມ່ນໃຫຍ່, ໂດຍທົ່ວໄປ i = 10 ~ 100. ໃນກົນໄກການຈັດດັດສະນີສຳລັບການສົ່ງໄຟຟ້າ, ສູງສຸດສາມາດເກີນ 1500.
✦ ການສ້າງຕາໜ່າງດຽວກັນນີ້ແມ່ນການຕິດຕໍ່ແບບເສັ້ນຊື່, ເຊິ່ງສາມາດທົນທານຕໍ່ພະລັງງານຂະໜາດໃຫຍ່.
✦ ໂຄງສ້າງກະທັດຮັດ, ລະບົບສົ່ງຕໍ່ລຽບງ່າຍ, ແລະ ສຽງລົບກວນຕໍ່າ.
✦ ເມື່ອມຸມຍົກຂອງຕົວໜອນໜ້ອຍກວ່າມຸມແຮງສຽດທານທຽບເທົ່າລະຫວ່າງເກຍ, ມັນຈະລັອກຕົວເອງດ້ວຍການເຄື່ອນທີ່ຕ້ານຈັງຫວະ, ນັ້ນຄື, ມີພຽງຕົວໜອນເທົ່ານັ້ນທີ່ສາມາດຂັບລໍ້ຕົວໜອນໄດ້, ບໍ່ແມ່ນລໍ້ຕົວໜອນ.
ຂໍ້ເສຍປຽບຂອງການຂັບເຄື່ອນເກຍໜອນ.
✦ດ້ວຍສອງແກນຕັ້ງສາກກັນ, ຄວາມໄວເສັ້ນຊື່ຂອງຈຸດລໍ້ສອງລໍ້ແມ່ນຕັ້ງສາກກັນ, ດັ່ງນັ້ນຄວາມໄວເລື່ອນທີ່ກ່ຽວຂ້ອງຈຶ່ງໃຫຍ່, ງ່າຍຕໍ່ການຮ້ອນ ແລະ ສວມໃສ່.
✦ປະສິດທິພາບຕໍ່າ, ໂດຍທົ່ວໄປແມ່ນ 0.7 ຫາ 0.8; ເກຍໜອນທີ່ມີເກຍໜອນລັອກດ້ວຍຕົນເອງແມ່ນມີປະສິດທິພາບໜ້ອຍກວ່າ, ໂດຍທົ່ວໄປແມ່ນໜ້ອຍກວ່າ 0.5.
ບໍ່ມໍເຕີ stepper ເກຍໜອນຈຳເປັນຕ້ອງມີປະສິດທິພາບການລັອກຕົວເອງບໍ?
ບໍ່, ມີເງື່ອນໄຂເບື້ອງຕົ້ນ. ເມື່ອມຸມນຳ < ມຸມສຽດທານ,ມໍເຕີ stepper ເກຍໜອນສາມາດລັອກດ້ວຍຕົນເອງໄດ້.
ໂດຍປົກກະຕິແລ້ວເມື່ອເລືອກມໍເຕີ stepper ຫຼຸດຜ່ອນເກຍ, ຜູ້ໃຊ້ຕ້ອງໃຊ້ການປ້ອງກັນໄຟຟ້າຂັດຂ້ອງ ຫຼື ມໍເຕີເບຣກ, ສະນັ້ນມໍເຕີຫຼຸດຜ່ອນເກຍຈະຖືກເລືອກດ້ວຍເບຣກເພື່ອບັນລຸຈຸດປະສົງຂອງການຢຸດ, ແຕ່ບໍ່ໄດ້ໝາຍຄວາມວ່າຢຸດຢ່າງແທ້ຈິງ, ຍັງມີຄວາມเฉื่อยເລັກນ້ອຍຢູ່.
ການລັອກຕົນເອງແມ່ນຫຍັງ?ແນວຄວາມຄິດຂອງການລັອກດ້ວຍຕົນເອງແມ່ນວ່າບໍ່ວ່າຈະມີແຮງຫຼາຍປານໃດກໍ່ບໍ່ສາມາດເລີ່ມຕົ້ນໄດ້, ບໍ່ວ່າຈະມີຄວາມเฉื่อยຫຼາຍປານໃດ, ຕາບໃດທີ່ວຽກງານຂອງສ່ວນທີ່ມີການເຄື່ອນໄຫວຢຸດການເຮັດວຽກ, ເຄື່ອງຈັກທັງໝົດສາມາດເບຣກໄດ້, ມໍເຕີ stepper ເກຍໜອນມີປະສິດທິພາບລັອກດ້ວຍຕົນເອງນີ້. ບໍ່ມີປະສິດທິພາບລັອກດ້ວຍຕົນເອງສຳລັບມໍເຕີ stepper ເກຍ, ແລະມີປະສິດທິພາບລັອກດ້ວຍຕົນເອງທີ່ໜ້າເຊື່ອຖືສຳລັບເຄື່ອງຫຼຸດເກຍໜອນທີ່ມີອັດຕາສ່ວນຄວາມໄວ 1:30 ຂຶ້ນໄປ, ແລະອັດຕາສ່ວນການຫຼຸດຜ່ອນທີ່ໃຫຍ່ກວ່າ, ປະສິດທິພາບລັອກດ້ວຍຕົນເອງກໍ່ຈະດີຂຶ້ນ.
ວິທີການເລືອກອັດຕາສ່ວນການຫຼຸດຜ່ອນເພື່ອຮັບປະກັນການປະຕິບັດການລັອກຕົນເອງຂອງມໍເຕີ stepper ເກຍຂອງໜອນ?
1、ຄ່າສຳປະສິດແຮງສຽດທານຂອງເກຍໜອນແມ່ນ 0.6, ມຸມນຳທາງເກຍໜອນແມ່ນໜ້ອຍກວ່າ 3°29′11″ ທີ່ລັອກດ້ວຍຕົນເອງ, ແລະໃນທາງກັບກັນ.
2、ຄ່າສຳປະສິດແຮງສຽດທານຂອງເກຍໜອນແມ່ນ 0.7, ມຸມນຳທາງເກຍໜອນແມ່ນໜ້ອຍກວ່າ 4°03′57″ ທີ່ລັອກດ້ວຍຕົນເອງ, ແລະໃນທາງກັບກັນ.
3、ເມື່ອຄ່າສຳປະສິດແຮງສຽດທານຂອງລໍ້ໜອນແມ່ນ 0.8, ມຸມນຳຂອງໜອນຈະໜ້ອຍກວ່າ 4°38′39″, ນັ້ນຄື, ລັອກດ້ວຍຕົນເອງ, ແລະໃນທາງກັບກັນ.
ເມື່ອມຸມນຳຂອງໜອນນ້ອຍກວ່າມຸມແຮງສຽດທານທີ່ທຽບເທົ່າລະຫວ່າງແຂ້ວຂອງລໍ້ຕາໜ່າງ, ກົນໄກມໍເຕີ stepper ຫຼຸດຜ່ອນມີການລັອກດ້ວຍຕົນເອງ, ເຊິ່ງສາມາດບັນລຸການລັອກດ້ວຍຕົນເອງແບບປີ້ນກັບກັນ, ນັ້ນຄື, ມີພຽງໜອນເທົ່ານັ້ນທີ່ສາມາດຂັບລໍ້ໜອນໄດ້, ແຕ່ລໍ້ໜອນບໍ່ສາມາດຂັບໜອນໄດ້. ໂດຍທົ່ວໄປໃນການອອກແບບເຄື່ອງຈັກໜັກ, ນັກອອກແບບມັກຈະໃຊ້ກົນໄກເກຍໜອນທີ່ມີການລັອກດ້ວຍຕົນເອງ, ເພາະວ່າການລັອກດ້ວຍຕົນເອງແບບປີ້ນກັບກັນຂອງມັນສາມາດມີບົດບາດສຳຄັນຫຼາຍໃນການປົກປ້ອງຄວາມປອດໄພ.
ສູດຄິດໄລ່ລໍ້ໜອນ ແລະ ເກຍໜອນ.
1. ອັດຕາສ່ວນການສົ່ງກຳລັງ = ຈຳນວນແຂ້ວເກຍໜອນ ÷ ຈຳນວນຫົວໜອນ
2, ໄລຍະຫ່າງກາງ = (ລະດັບຄວາມສູງຂອງລໍ້ໜອນ + ລະດັບຄວາມສູງຂອງເກຍໜອນ) ÷ 2
3, ເສັ້ນຜ່າສູນກາງລໍ້ໜອນ = (ຈຳນວນແຂ້ວ + 2) × ໂມດູລັດ
4, ໄລຍະຫ່າງຂອງລໍ້ໜອນ = ໂມດູນ × ຈຳນວນແຂ້ວ
5, ໄລຍະຫ່າງຂອງໜອນ = ເສັ້ນຜ່າສູນກາງພາຍນອກຂອງໜອນ - 2 × ໂມດູນ
6. ຄູ່ມືໜອນ = π×ໂມດູນ×ຫົວ
7、ມຸມກ້ຽວວຽນ (ມຸມນຳທາງ) tgB=(ໂມດູນ × ຈຳນວນຫົວ) ÷ ມຸມຂອງໜອນ
8. ສາຍໜອນ = π × ໂມດູນ × ຫົວ
9、ໂມດູນ = ເສັ້ນຜ່າສູນກາງຂອງວົງມົນດັດຊະນີ/ຈຳນວນແຂ້ວ
ຈຳນວນຫົວຂອງແມ່ທ້ອງ: ແມ່ທ້ອງຫົວດຽວ (ມີພຽງກ້ຽວວຽນດຽວຢູ່ເທິງແມ່ທ້ອງ, ໝາຍຄວາມວ່າແມ່ທ້ອງໝູນເປັນເວລາໜຶ່ງອາທິດ ແລະ ລໍ້ແມ່ທ້ອງໝູນຜ່ານແຂ້ວໜຶ່ງ); ແມ່ທ້ອງສອງຫົວ (ມີສອງກ້ຽວວຽນຢູ່ເທິງແມ່ທ້ອງ, ໝາຍຄວາມວ່າແມ່ທ້ອງໝູນເປັນເວລາໜຶ່ງອາທິດ ແລະ ລໍ້ແມ່ທ້ອງໝູນຜ່ານແຂ້ວສອງຂ້າງ).
ໂມດູນແມ່ນຂະໜາດຂອງກ້ຽວວຽນຢູ່ເທິງສະກູ, ໝາຍຄວາມວ່າ ໂມດູນໃຫຍ່ເທົ່າໃດ, ກ້ຽວວຽນຢູ່ເທິງສະກູກໍ່ຈະໃຫຍ່ຂຶ້ນເທົ່ານັ້ນ.
ປັດໄຈເສັ້ນຜ່າສູນກາງແມ່ນຄວາມໜາຂອງສະກູ.
ໂມດູນ: ວົງມົນດັດຊະນີຂອງເກຍແມ່ນມາດຕະຖານສຳລັບການອອກແບບ ແລະ ການຄິດໄລ່ຂະໜາດຂອງແຕ່ລະສ່ວນຂອງເກຍ, ແລະ ເສັ້ນຮອບວົງຂອງວົງມົນດັດຊະນີເກຍ = πd = zp, ສະນັ້ນເສັ້ນຜ່າສູນກາງຂອງວົງມົນດັດຊະນີ
d=zp/π
ເນື່ອງຈາກ π ເປັນຈຳນວນອະສົມຜົນໃນສົມຜົນຂ້າງເທິງ, ມັນຈຶ່ງບໍ່ສະດວກຕໍ່ການວາງຕຳແໜ່ງຂອງວົງມົນດັດຊະນີເປັນຕົວອ້າງອີງ. ເພື່ອຄວາມສະດວກໃນການຄິດໄລ່, ການຜະລິດ ແລະ ການກວດກາ, ອັດຕາສ່ວນ p/π ໃນປັດຈຸບັນຈຶ່ງຖືກລະບຸເປັນຄ່າງ່າຍໆບາງຢ່າງ, ແລະ ອັດຕາສ່ວນດັ່ງກ່າວເອີ້ນວ່າ ໂມດູນ (ໂມດູນ), ສະແດງເປັນ m.
ປະເພດຂອງເກຍໜອນ
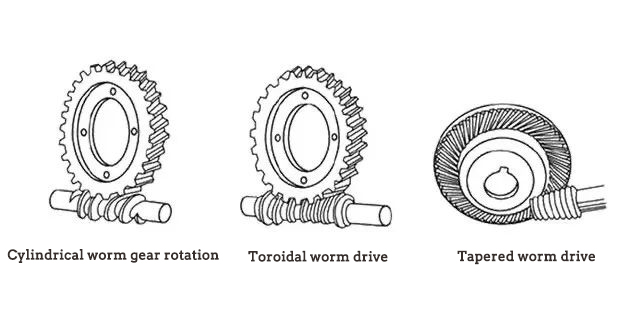
ອີງຕາມຮູບຮ່າງທີ່ແຕກຕ່າງກັນຂອງໜອນ, ໜອນສາມາດແບ່ງອອກເປັນໄດຣເວີຮູບຊົງກະບອກ, ໄດຣເວີຮູບວົງແຫວນ ແລະ ໄດຣເວີຮູບຈວຍ. ໃນນັ້ນ, ໄດຣເວີຮູບຊົງກະບອກແມ່ນໃຊ້ຢ່າງກວ້າງຂວາງທີ່ສຸດ.
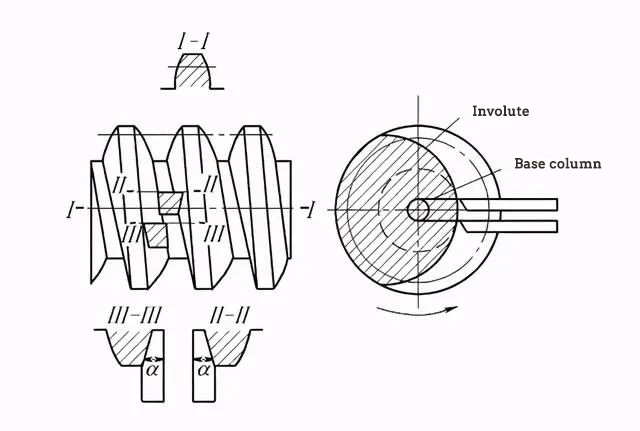
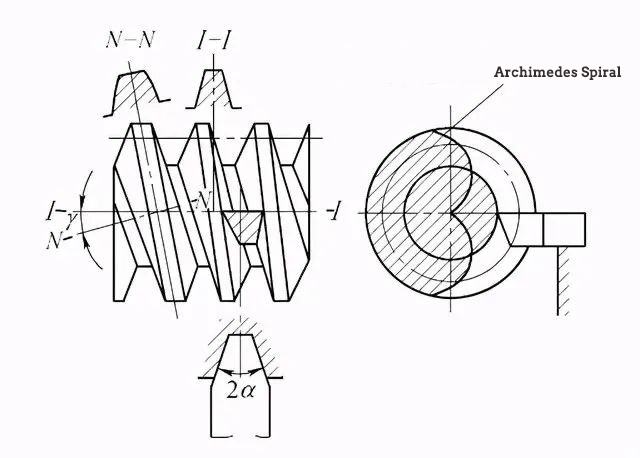
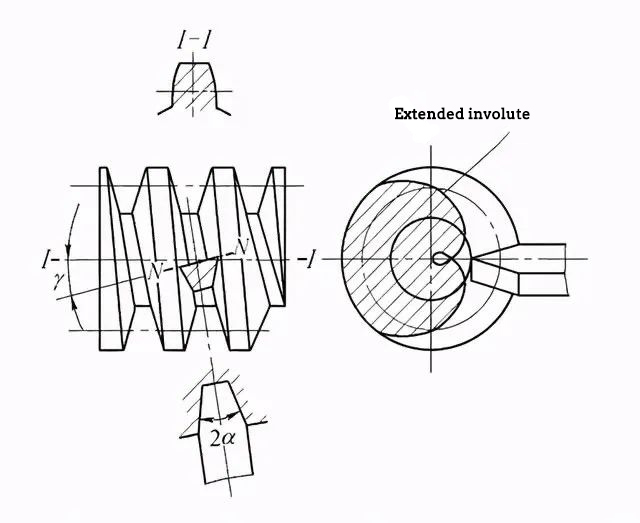
ເກຍໜອນຮູບຊົງກະບອກທຳມະດາສ່ວນຫຼາຍແມ່ນຕັດໃສ່ເຄື່ອງກຶງດ້ວຍເຄື່ອງມືກ້ຽວທີ່ມີໃບມີດຊື່. ດ້ວຍການປ່ຽນແປງຂອງຕຳແໜ່ງການຕິດຕັ້ງເຄື່ອງມື ແລະ ເຄື່ອງມືທີ່ໃຊ້, ສາມາດໄດ້ຮັບເກຍໜອນສີ່ປະເພດທີ່ມີຮູບແບບແຂ້ວແຕກຕ່າງກັນໃນພາກຕັດຂວາງຂອງແກນຕັ້ງ: ເກຍໜອນແບບມ້ວນ (ປະເພດ ZI), ເກຍໜອນແບບອາຣ໌ຄິມີດີສ (ປະເພດ ZA), ເກຍໜອນແບບຊື່ປົກກະຕິ (ZN), ແລະ ເກຍໜອນຮູບຊົງກະບອກແບບຈວຍ (ZK).
ໜອນທີ່ມີຮູບຮ່າງໂຄ້ງ (ປະເພດ ZI)- ແພນຂອງໃບມີດສຳຜັດກັບກະບອກສູບຖານໜອນ, ແລະ ແຂ້ວປາຍມີຮູບຊົງໂຄ້ງ, ເໝາະສົມກັບຄວາມໄວສູງ ແລະ ພະລັງງານທີ່ໃຫຍ່ກວ່າ.
ໜອນ Archimedean (ປະເພດ ZA)- ຮູບຮ່າງແຂ້ວທີ່ຕັ້ງສາກກັບລະນາບແກນແມ່ນສະກູ Archimedean, ແລະຮູບຮ່າງແຂ້ວໃນລະນາບທີ່ຜ່ານມາແກນແມ່ນຊື່, ປະມວນຜົນງ່າຍ ແລະ ມີຄວາມຖືກຕ້ອງຕ່ຳ. (ເກຍໜອນຮູບຊົງຊື່ແກນ).
ໜອນຮູບຊົງຊື່ປົກກະຕິ (ZN)- ສາມາດໃຊ້ເພື່ອບົດແຂ້ວດ້ວຍລໍ້ບົດທີ່ຖືກດັດແປງ, ການປະມວນຜົນແມ່ນງ່າຍດາຍ, ມັກໃຊ້ສໍາລັບໜອນຫຼາຍຫົວ, ປະສິດທິພາບການສົ່ງຜ່ານສູງເຖິງ 0.9.
ເຫັນວ່າທ່ານມີຄວາມເຂົ້າໃຈສັ້ນໆກ່ຽວກັບການຖ່າຍທອດຫຼັກການຂອງມໍເຕີເກຍໜອນ, ຖ້າມີສິ່ງອື່ນໃດທີ່ທ່ານຕ້ອງການສື່ສານ, ກະລຸນາຕິດຕໍ່ພວກເຮົາ!
ພວກເຮົາພົວພັນຢ່າງໃກ້ຊິດກັບລູກຄ້າຂອງພວກເຮົາ, ຮັບຟັງຄວາມຕ້ອງການຂອງເຂົາເຈົ້າ ແລະ ປະຕິບັດຕາມຄຳຮ້ອງຂໍຂອງເຂົາເຈົ້າ. ພວກເຮົາເຊື່ອວ່າພື້ນຖານຂອງການຮ່ວມມືທີ່ໄດ້ຮັບຜົນປະໂຫຍດທັງສອງຝ່າຍແມ່ນຄຸນນະພາບຂອງຜະລິດຕະພັນ ແລະ ການບໍລິການລູກຄ້າ.
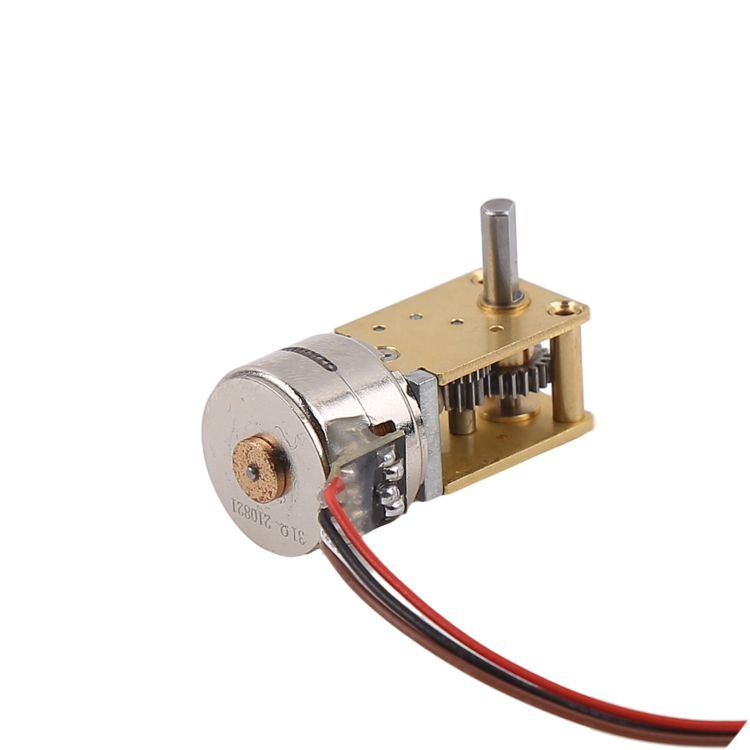
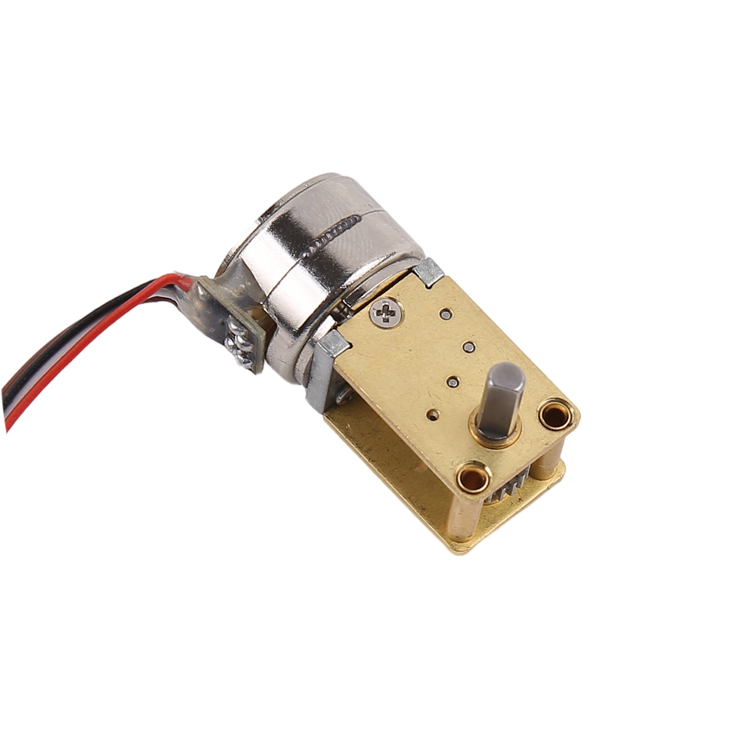
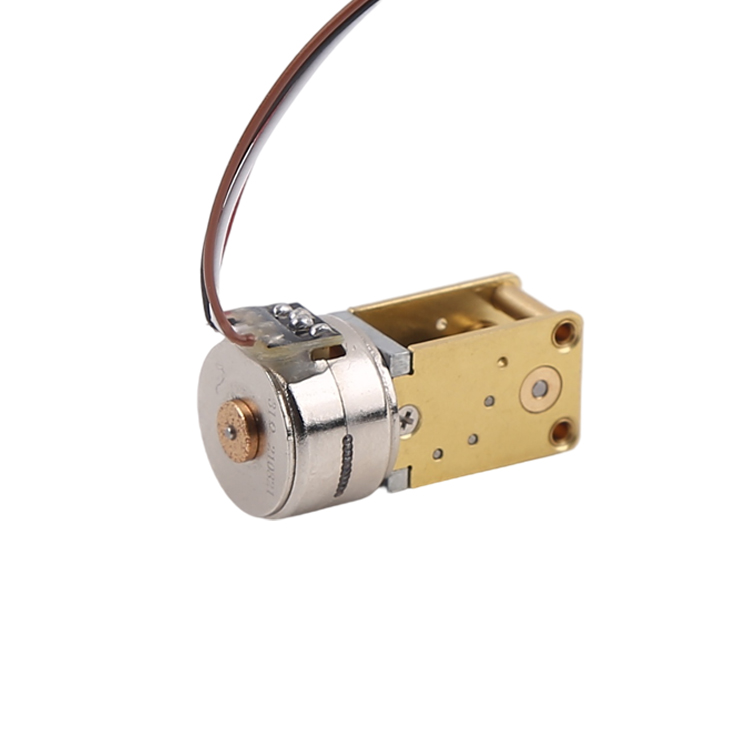
ບໍລິສັດ Changzhou Vic-tech Motor Technology Co., Ltd. ເປັນອົງການຄົ້ນຄວ້າ ແລະ ຜະລິດມືອາຊີບທີ່ສຸມໃສ່ການຄົ້ນຄວ້າ ແລະ ພັດທະນາມໍເຕີ, ວິທີແກ້ໄຂໂດຍລວມສຳລັບການນຳໃຊ້ມໍເຕີ, ແລະ ການປຸງແຕ່ງ ແລະ ການຜະລິດຜະລິດຕະພັນມໍເຕີ. ບໍລິສັດ ຈຳກັດ ມີຄວາມຊ່ຽວຊານໃນການຜະລິດມໍເຕີຂະໜາດນ້ອຍ ແລະ ອຸປະກອນເສີມຕັ້ງແຕ່ປີ 2011. ຜະລິດຕະພັນຫຼັກຂອງພວກເຮົາ: ມໍເຕີສະເຕບເປີຂະໜາດນ້ອຍ, ມໍເຕີເກຍ, ມໍເຕີເກຍ, ເຄື່ອງຂັບດັນໃຕ້ນ້ຳ ແລະ ໄດຣເວີ ແລະ ຕົວຄວບຄຸມມໍເຕີ.

ທີມງານຂອງພວກເຮົາມີປະສົບການຫຼາຍກວ່າ 20 ປີໃນການອອກແບບ, ພັດທະນາ ແລະ ຜະລິດມໍເຕີຂະໜາດນ້ອຍ, ແລະ ສາມາດພັດທະນາຜະລິດຕະພັນ ແລະ ຊ່ວຍເຫຼືອລູກຄ້າໃນການອອກແບບຕາມຄວາມຕ້ອງການພິເສດ! ໃນປະຈຸບັນ, ພວກເຮົາສ່ວນໃຫຍ່ຂາຍໃຫ້ລູກຄ້າໃນຫຼາຍຮ້ອຍປະເທດໃນອາຊີ, ອາເມລິກາເໜືອ ແລະ ເອີຣົບ, ເຊັ່ນ: ອາເມລິກາ, ອັງກິດ, ເກົາຫຼີ, ເຢຍລະມັນ, ການາດາ, ສະເປນ, ແລະອື່ນໆ. ປັດຊະຍາທຸລະກິດ "ຄວາມຊື່ສັດ ແລະ ຄວາມໜ້າເຊື່ອຖື, ເນັ້ນຄຸນນະພາບ", ມາດຕະຖານຄຸນຄ່າ "ລູກຄ້າກ່ອນ" ຂອງພວກເຮົາສະໜັບສະໜູນນະວັດຕະກຳທີ່ເນັ້ນປະສິດທິພາບ, ການຮ່ວມມື, ຈິດໃຈວິສາຫະກິດທີ່ມີປະສິດທິພາບ, ເພື່ອສ້າງ "ການສ້າງ ແລະ ແບ່ງປັນ". ເປົ້າໝາຍສຸດທ້າຍແມ່ນເພື່ອສ້າງມູນຄ່າສູງສຸດໃຫ້ກັບລູກຄ້າຂອງພວກເຮົາ.
ເວລາໂພສ: ມັງກອນ 30-2023