ການສົ່ງເຄື່ອງມືແມ່ທ້ອງແມ່ນປະກອບດ້ວຍແມ່ທ້ອງແລະລໍ້ແມ່ທ້ອງ, ແລະໂດຍທົ່ວໄປແລ້ວແມ່ທ້ອງແມ່ນສ່ວນທີ່ຫ້າວຫັນ. ເຄື່ອງມືແມ່ທ້ອງມີເສັ້ນດ້າຍມືຂວາ ແລະມືຊ້າຍຄືກັນ, ເຊິ່ງເອີ້ນວ່າເຄື່ອງມືແມ່ທ້ອງຂວາ ແລະມືຊ້າຍຕາມລໍາດັບ. ແມ່ທ້ອງແມ່ນເຄື່ອງມືທີ່ມີແຂ້ວເລື່ອຍໜຶ່ງ ຫຼືຫຼາຍອັນທີ່ຕິດກັນກັບລໍ້ແມ່ທ້ອງເພື່ອສ້າງເປັນຄູ່ເກຍ shaft staggered. ດ້ານການຈັດດັດສະນີສາມາດເປັນຮູບທໍ່ກົມ, ຮູບຈວຍ ຫຼື ວົງມົນ, ແລະມີສີ່ປະເພດຂອງແມ່ທ້ອງ Archimedes, ແມ່ທ້ອງ involute, ແມ່ທ້ອງເສັ້ນຊື່ປົກກະຕິ, ແລະແມ່ທ້ອງຮູບທໍ່ກົມ tapered enveloping.
ຂໍ້ໄດ້ປຽບຂອງການສົ່ງເຄື່ອງມືແມ່ທ້ອງ.
✦ອັດຕາສ່ວນການສົ່ງຕໍ່ຂັ້ນຕອນດຽວແມ່ນຂະຫນາດໃຫຍ່, ໂດຍທົ່ວໄປ i = 10 ~ 100. ໃນກົນໄກດັດສະນີສໍາລັບການສົ່ງໄຟຟ້າ, ສູງສຸດສາມາດເກີນ 1500.
✦ ຕາຫນ່າງດຽວກັນແມ່ນການຕິດຕໍ່ເສັ້ນ, ເຊິ່ງສາມາດທົນທານຕໍ່ພະລັງງານຂະຫນາດໃຫຍ່.
✦ໂຄງປະກອບການກະທັດຮັດ, ສົ່ງກ້ຽງ, ແລະສຽງລົບກວນຕ່ໍາ.
✦ ເມື່ອມຸມຍົກຂອງແມ່ທ້ອງນ້ອຍກວ່າມຸມ friction ທຽບເທົ່າລະຫວ່າງເກຍ, ມັນຖືກລັອກດ້ວຍຕົນເອງດ້ວຍ counter-stroke, ຫມາຍຄວາມວ່າພຽງແຕ່ແມ່ທ້ອງສາມາດຂັບລົດລໍ້ແມ່ທ້ອງ, ບໍ່ແມ່ນລໍ້ແມ່ທ້ອງ.
ຂໍ້ເສຍຂອງ worm gear drive.
✦ດ້ວຍສອງແກນຕັດກັນ, ຄວາມໄວເສັ້ນຂອງສອງລໍ້ແມ່ນຕັ້ງສາກກັນ, ດັ່ງນັ້ນຄວາມໄວໃນການເລື່ອນທີ່ກ່ຽວຂ້ອງແມ່ນມີຂະຫນາດໃຫຍ່, ງ່າຍຕໍ່ການເຮັດຄວາມຮ້ອນແລະໃສ່.
✦ປະສິດທິພາບຕ່ໍາ, ໂດຍທົ່ວໄປແລ້ວ 0.7 ຫາ 0.8; ເຄື່ອງມືແມ່ທ້ອງທີ່ມີເຄື່ອງມືແມ່ທ້ອງລັອກດ້ວຍຕົນເອງແມ່ນມີປະສິດທິພາບຫນ້ອຍ, ໂດຍທົ່ວໄປແລ້ວຫນ້ອຍກວ່າ 0.5.
ກworm gear stepper motorຈໍາເປັນຕ້ອງມີການປະຕິບັດຕົນເອງ locking?
ບໍ່, ມີເງື່ອນໄຂເບື້ອງຕົ້ນ. ເມື່ອມຸມນໍາພາ < friction angle, theworm gear stepper motorສາມາດລັອກຕົນເອງໄດ້.
ໂດຍປົກກະຕິແລ້ວໃນເວລາທີ່ມໍເຕີຫຼຸດເກຍ stepper ຖືກເລືອກ, ຜູ້ໃຊ້ຕ້ອງໃຊ້ການປ້ອງກັນຄວາມລົ້ມເຫຼວຂອງພະລັງງານຫຼືມໍເຕີເບກ, ດັ່ງນັ້ນມໍເຕີຫຼຸດລົງເກຍຈະຖືກເລືອກດ້ວຍເບກເພື່ອບັນລຸຈຸດປະສົງຂອງການຢຸດ, ແຕ່ບໍ່ໄດ້ຫມາຍຄວາມວ່າການຢຸດເຊົາຢ່າງແທ້ຈິງ, inertia ເລັກນ້ອຍຍັງມີຢູ່.
ການລັອກຕົນເອງແມ່ນຫຍັງ?ແນວຄວາມຄິດຂອງ locking ຕົນເອງແມ່ນວ່າບໍ່ວ່າຈະເປັນແຮງຫຼາຍບໍ່ສາມາດເລີ່ມຕົ້ນ, ບໍ່ວ່າຈະເປັນ inertia ຫຼາຍປານໃດ, ຕາບໃດທີ່ການເຮັດວຽກຂອງພາກສ່ວນທີ່ຫ້າວຫັນທີ່ຈະຢຸດເຊົາການແລ່ນ, ເຄື່ອງທັງຫມົດສາມາດຫ້າມລໍ້, worm gear geared stepper motor ມີການປະຕິບັດການລັອກຕົນເອງ. ບໍ່ມີການປະຕິບັດການລັອກດ້ວຍຕົນເອງສໍາລັບມໍເຕີ stepper geared, ແລະມີການປະຕິບັດການລັອກຕົນເອງທີ່ເຊື່ອຖືໄດ້ສໍາລັບຕົວຫຼຸດເກຍແມ່ທ້ອງທີ່ມີອັດຕາສ່ວນຄວາມໄວ 1: 30 ແລະສູງກວ່າ, ແລະອັດຕາສ່ວນການຫຼຸດຜ່ອນຂະຫນາດໃຫຍ່, ການປະຕິບັດການລັອກຕົວຂອງມັນເອງດີກວ່າ.
ວິທີການເລືອກອັດຕາສ່ວນການຫຼຸດຜ່ອນເພື່ອຮັບປະກັນການປະຕິບັດການລັອກດ້ວຍຕົນເອງຂອງ worm gear stepper motor?
1, ຕົວຄູນ friction ຂອງແມ່ທ້ອງແມ່ນ 0.6, ມຸມຄູ່ມືຂອງແມ່ທ້ອງແມ່ນຫນ້ອຍກ່ວາ 3° 29′11″ ທີ່ມີຕົນເອງ locking, ແລະໃນທາງກັບກັນ.
2, ຕົວຄູນ friction ຂອງແມ່ທ້ອງແມ່ນ 0.7, ມຸມຄູ່ມືຂອງແມ່ທ້ອງແມ່ນຫນ້ອຍກ່ວາ 4° 03′57″ ທີ່ເປັນຕົວ locking, ແລະໃນທາງກັບກັນ.
3, ເມື່ອຄ່າສໍາປະສິດ friction ຂອງລໍ້ແມ່ທ້ອງແມ່ນ 0.8, ມຸມນໍາຂອງແມ່ທ້ອງແມ່ນຫນ້ອຍກ່ວາ 4° 38′39″, ນັ້ນແມ່ນ, locking ຕົນເອງ, ແລະໃນທາງກັບກັນ.
ໃນເວລາທີ່ມຸມນໍາຂອງແມ່ທ້ອງແມ່ນຫນ້ອຍກ່ວາມຸມ friction ທຽບເທົ່າລະຫວ່າງແຂ້ວຂອງລໍ້ຕາຫນ່າງ, ກົນໄກການຫຼຸດຜ່ອນການ stepper motor ມີ locking ຕົນເອງ, ເຊິ່ງສາມາດບັນລຸ reverse self-locking, ນັ້ນແມ່ນ, ມີພຽງແຕ່ແມ່ທ້ອງສາມາດຂັບລົດລໍ້ແມ່ທ້ອງ, ແຕ່ບໍ່ແມ່ນລໍ້ແມ່ທ້ອງຂັບແມ່ທ້ອງ. ໂດຍທົ່ວໄປໃນການອອກແບບຂອງເຄື່ອງຈັກຫນັກ, ຜູ້ອອກແບບມີແນວໂນ້ມທີ່ຈະໃຊ້ກົນໄກການເກຍແມ່ທ້ອງດ້ວຍການລັອກດ້ວຍຕົນເອງ, ເພາະວ່າການລັອກດ້ວຍຕົວມັນເອງແບບກົງກັນຂ້າມສາມາດມີບົດບາດສໍາຄັນຫຼາຍໃນການປົກປ້ອງຄວາມປອດໄພ.
ສູດການຄິດໄລ່ຂອງລໍ້ແມ່ທ້ອງ ແລະເຄື່ອງມືແມ່ທ້ອງ.
1. ອັດຕາສ່ວນສາຍສົ່ງ = ຈຳນວນຂອງແຂ້ວແມ່ທ້ອງ ÷ ຈຳນວນຫົວແມ່ທ້ອງ
2, ໄລຍະສູນກາງ = (ລໍ້ແມ່ທ້ອງ + pitch worm gear) ÷ 2
3, ເສັ້ນຜ່າສູນກາງຂອງລໍ້ແມ່ທ້ອງ = (ຈໍານວນແຂ້ວ + 2) × modulus
4, worm wheel pitch = ໂມດູນ×ຈໍານວນຂອງແຂ້ວ
5, worm pitch = ແມ່ທ້ອງເສັ້ນຜ່າສູນກາງນອກ -2 ×ໂມດູນ
6, ຄູ່ມືແມ່ທ້ອງ = π×ໂມດູນ×ຫົວ
7 ມຸມ Helix (ມຸມຄູ່ມື) tgB = (modulus × head number) ÷worm pitch
8, ຕົວກອກ = π×ໂມດູນ×ຫົວ
9, Modulus = ເສັ້ນຜ່າກາງຂອງວົງມົນດັດຊະນີ / ຈໍານວນຂອງແຂ້ວ
ຈໍານວນຂອງຫົວຂອງແມ່ທ້ອງ: ແມ່ທ້ອງຫົວດຽວ (ມີພຽງແຕ່ຫນຶ່ງ helix ຂອງແມ່ທ້ອງ, ຄືແມ່ທ້ອງຫັນເປັນຫນຶ່ງອາທິດແລະລໍ້ແມ່ທ້ອງຫັນຜ່ານຫນຶ່ງແຂ້ວ); ແມ່ທ້ອງຫົວສອງ (ມີສອງ helixs ສຸດແມ່ທ້ອງ, ຄືແມ່ທ້ອງຫັນໄປຫນຶ່ງອາທິດແລະລໍ້ແມ່ທ້ອງຫັນຜ່ານສອງແຂ້ວ).
Modulus ແມ່ນຂະຫນາດຂອງ helix ໃນ screw ໄດ້, ie modulus ຂະຫນາດໃຫຍ່, helix ຂະຫນາດໃຫຍ່ໃນ screw ໄດ້.
ປັດໄຈເສັ້ນຜ່າສູນກາງແມ່ນຄວາມຫນາຂອງສະກູ.
ໂມດູລັສ: ວົງກົມດັດສະນີຂອງເກຍເປັນຕົວຊີ້ວັດໃນການອອກແບບ ແລະຄຳນວນຂະໜາດຂອງແຕ່ລະພາກສ່ວນຂອງເກຍ, ແລະ ເສັ້ນຮອບວົງວຽນຂອງເກຍດັດຊະນີ = πd = zp, ດັ່ງນັ້ນເສັ້ນຜ່າສູນກາງຂອງວົງການດັດສະນີ.
d=zp/π
ເນື່ອງຈາກ π ເປັນຕົວເລກທີ່ບໍ່ສົມເຫດສົມຜົນໃນສົມຜົນຂ້າງເທິງ, ມັນບໍ່ສະດວກສໍາລັບການວາງຕໍາແຫນ່ງຂອງວົງກົມດັດຊະນີເປັນການອ້າງອີງ. ເພື່ອສ້າງຄວາມສະດວກໃນການຄິດໄລ່, ການຜະລິດແລະການກວດກາ, ອັດຕາສ່ວນ p / πໃນປັດຈຸບັນຖືກລະບຸປອມເປັນບາງຄ່າງ່າຍດາຍ, ແລະອັດຕາສ່ວນເອີ້ນວ່າໂມດູລ (ໂມດູນ), ສະແດງອອກເປັນ m.
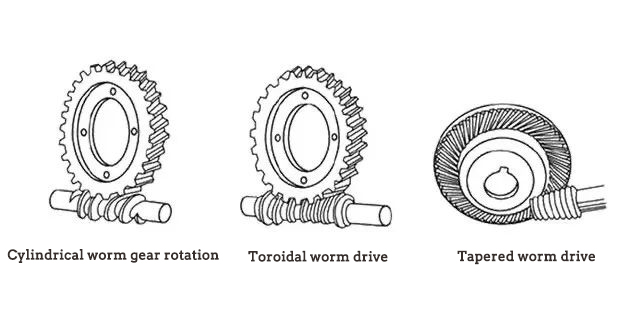
ປະເພດຂອງເຄື່ອງມືແມ່ທ້ອງ
ອີງຕາມຮູບຮ່າງທີ່ແຕກຕ່າງກັນຂອງແມ່ທ້ອງ, ແມ່ທ້ອງສາມາດແບ່ງອອກເປັນ cylindrical worm drive, annular worm drive ແລະຂັບແມ່ທ້ອງຮູບຈວຍ. ໃນບັນດາພວກເຂົາ, ການຂັບແມ່ທ້ອງເປັນທໍ່ກົມແມ່ນການນໍາໃຊ້ຢ່າງກວ້າງຂວາງທີ່ສຸດ.
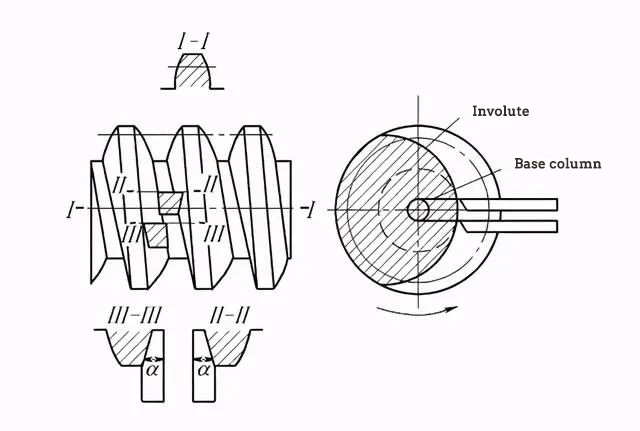
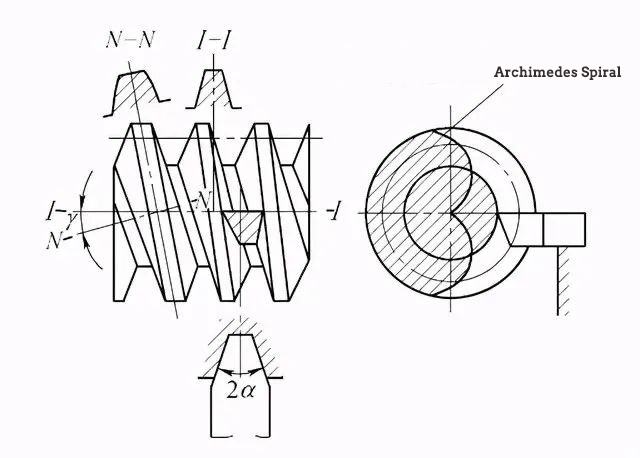
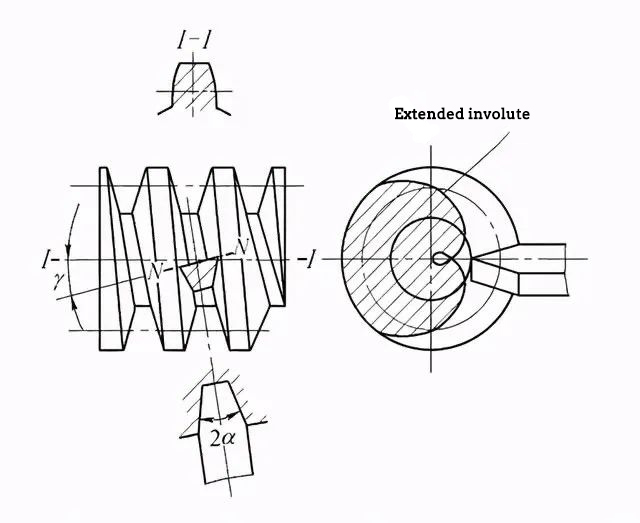
ເຄື່ອງມືແມ່ທ້ອງເປັນຮູບທໍ່ກົມທຳມະດາສ່ວນຫຼາຍແມ່ນຕັດຢູ່ເທິງເຄື່ອງກຶງດ້ວຍເຄື່ອງມືຫັນດ້ວຍໃບມີດລົດເມຊື່. ດ້ວຍການປ່ຽນແປງຂອງຕໍາແຫນ່ງການຕິດຕັ້ງເຄື່ອງມືແລະເຄື່ອງມືທີ່ໃຊ້, ເຄື່ອງມືແມ່ທ້ອງສີ່ປະເພດທີ່ມີຮູບແບບແຂ້ວທີ່ແຕກຕ່າງກັນໃນສ່ວນຂ້າມຂອງແກນຕັ້ງສາມາດໄດ້ຮັບ: ເຄື່ອງມືແມ່ທ້ອງ involute (ZI), ເຄື່ອງມືແມ່ທ້ອງ Archimedes (ປະເພດ ZA), ເຟືອງແມ່ທ້ອງປົກກະຕິຊື່ (ZN), ແລະ tapered enveloping cylindrical worm gears (Z).
ແມ່ທ້ອງລວມ (ປະເພດ ZI)- ແຜ່ນໃບມີດແມ່ນ tangent ກັບ cylinder ຖານແມ່ທ້ອງ, ແລະແຂ້ວທ້າຍແມ່ນ involute, ເຫມາະສໍາລັບຄວາມໄວສູງແລະພະລັງງານຂະຫນາດໃຫຍ່.
ແມ່ທ້ອງ Archimedean (ປະເພດ ZA)- ແຂ້ວ profile perpendicular ກັບຍົນແກນແມ່ນ Archimedean screw, ແລະ profile ແຂ້ວໃນຍົນທີ່ຜ່ານມາແກນແມ່ນຊື່, ການປຸງແຕ່ງງ່າຍດາຍແລະຄວາມຖືກຕ້ອງຕ່ໍາ. (ເກຍ worm gear axial straight profile).
ແມ່ທ້ອງໂປຣໄຟລ໌ຊື່ປົກກະຕິ (ZN)- ສາມາດນໍາໃຊ້ເພື່ອ grind ແຂ້ວດ້ວຍການປັບປຸງແກ້ໄຂລໍ້ grinding, ການປຸງແຕ່ງແມ່ນງ່າຍດາຍ, ມັກຈະນໍາໃຊ້ສໍາລັບແມ່ທ້ອງຫຼາຍຫົວ, ປະສິດທິພາບການສົ່ງເຖິງ 0.9.
ເຫັນວ່າທ່ານມີຄວາມເຂົ້າໃຈສັ້ນໆກ່ຽວກັບການສົ່ງຕໍ່ຫຼັກການຂອງworm gear motors, ຖ້າຫາກວ່າມີຫຍັງອີກແດ່ທີ່ທ່ານຕ້ອງການສື່ສານ, ກະລຸນາຕິດຕໍ່ພວກເຮົາ!
ພວກເຮົາພົວພັນຢ່າງໃກ້ຊິດກັບລູກຄ້າຂອງພວກເຮົາ, ຟັງຄວາມຕ້ອງການຂອງເຂົາເຈົ້າແລະປະຕິບັດຕາມຄໍາຮ້ອງຂໍຂອງເຂົາເຈົ້າ. ພວກເຮົາເຊື່ອວ່າພື້ນຖານຂອງການຮ່ວມມື win-win ແມ່ນຄຸນນະພາບຜະລິດຕະພັນແລະການບໍລິການລູກຄ້າ.
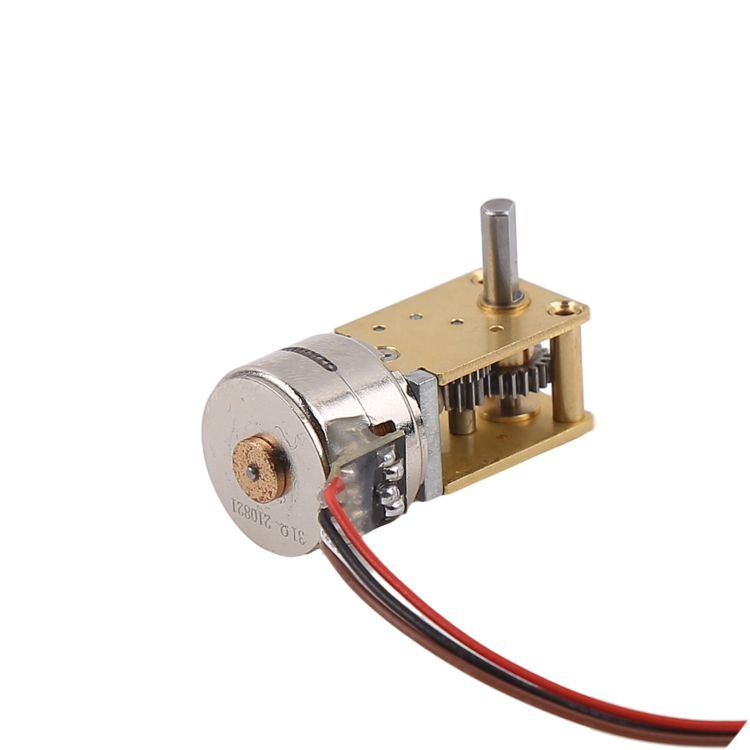
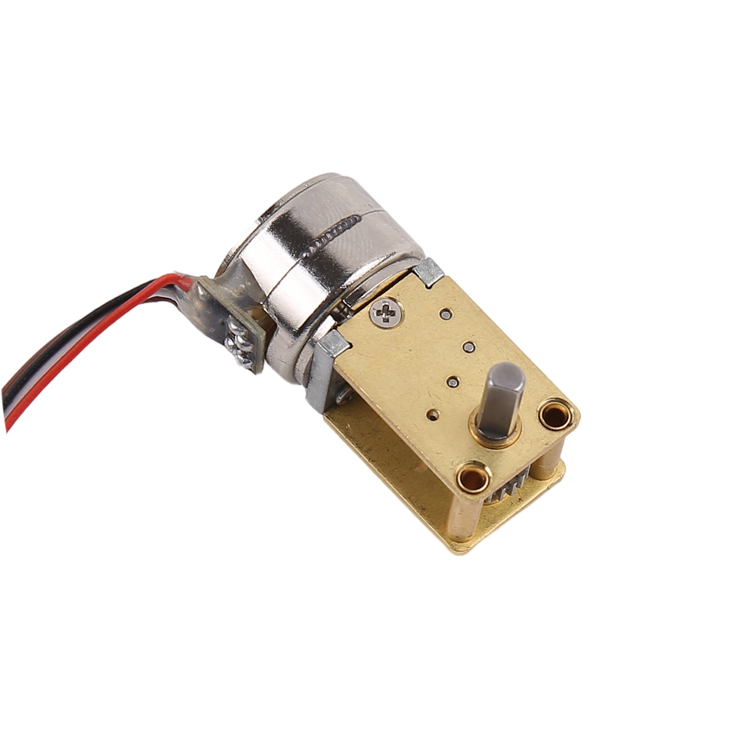
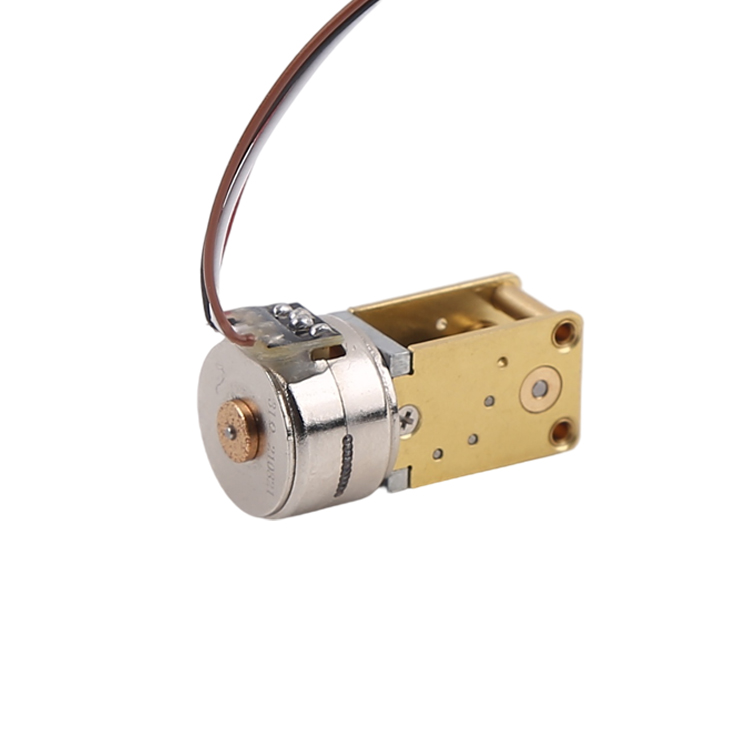
Changzhou Vic-tech Motor Technology Co., Ltd ເປັນອົງການຄົ້ນຄ້ວາແລະການຜະລິດມືອາຊີບທີ່ສຸມໃສ່ການຄົ້ນຄວ້າແລະການພັດທະນາ motor, ການແກ້ໄຂໂດຍລວມສໍາລັບການນໍາໃຊ້ motor, ແລະການປຸງແຕ່ງແລະການຜະລິດຜະລິດຕະພັນ motor. Ltd. ໄດ້ຮັບການຊ່ຽວຊານໃນການຜະລິດ motors ຈຸນລະພາກແລະອຸປະກອນເສີມນັບຕັ້ງແຕ່ 2011. ຜະລິດຕະພັນຕົ້ນຕໍຂອງພວກເຮົາ: ມໍເຕີ stepper miniature, motors gear, geared motors, underwater thrusters ແລະ motor drivers and controllers.

ທີມງານຂອງພວກເຮົາມີປະສົບການຫຼາຍກວ່າ 20 ປີໃນການອອກແບບ, ພັດທະນາແລະຜະລິດເຄື່ອງຈັກຈຸລະພາກ, ແລະສາມາດພັດທະນາຜະລິດຕະພັນແລະຊ່ວຍເຫຼືອລູກຄ້າໃນການອອກແບບຕາມຄວາມຕ້ອງການພິເສດ! ໃນປັດຈຸບັນ, ພວກເຮົາສ່ວນໃຫຍ່ແມ່ນຂາຍໃຫ້ລູກຄ້າໃນຫຼາຍຮ້ອຍປະເທດໃນອາຊີ, ອາເມລິກາເຫນືອແລະເອີຣົບ, ເຊັ່ນ: ອາເມລິກາ, ອັງກິດ, ເກົາຫຼີ, ເຢຍລະມັນ, ການາດາ, ສະເປນ, ແລະອື່ນໆ "ຄວາມຊື່ສັດແລະຄວາມຫນ້າເຊື່ອຖື, ຮັດກຸມຄຸນນະພາບ" ປັດຊະຍາທຸລະກິດ, "ລູກຄ້າທໍາອິດ" ຄ່າມາດຕະຖານ advocate ການປະຕິບັດ - ຮັດກຸມນະວັດກໍາ, ການຮ່ວມມື, ປະສິດທິພາບຈິດໃຈຂອງວິສາຫະກິດ, to establish a maximum value for customers' build.
ເວລາປະກາດ: ມັງກອນ-30-2023