ເມື່ອອອກແບບອຸປະກອນໂດຍໃຊ້ມໍເຕີ, ແນ່ນອນວ່າມັນຈຳເປັນຕ້ອງເລືອກມໍເຕີທີ່ເໝາະສົມທີ່ສຸດສຳລັບວຽກທີ່ຕ້ອງການ. ເອກະສານສະບັບນີ້ຈະປຽບທຽບລັກສະນະ, ປະສິດທິພາບ ແລະ ລັກສະນະຂອງມໍເຕີແປງ.ມໍເຕີສະເຕບເປີແລະ ມໍເຕີທີ່ບໍ່ມີແປງ, ຫວັງວ່າຈະເປັນເອກະສານອ້າງອີງສຳລັບທຸກຄົນເມື່ອເລືອກມໍເຕີ. ເຖິງຢ່າງໃດກໍ່ຕາມ, ເນື່ອງຈາກມີຫຼາຍລາຍລະອຽດໃນໝວດໝູ່ດຽວກັນຂອງມໍເຕີ, ກະລຸນາໃຊ້ພວກມັນເພື່ອອ້າງອີງເທົ່ານັ້ນ. ສຸດທ້າຍ, ມັນຈຳເປັນຕ້ອງຢືນຢັນຂໍ້ມູນລະອຽດຜ່ານລາຍລະອຽດດ້ານເຕັກນິກຂອງແຕ່ລະມໍເຕີ.
ຄຸນສົມບັດຂອງມໍເຕີຂະໜາດນ້ອຍ: ຕາຕະລາງຕໍ່ໄປນີ້ສະຫຼຸບຄຸນສົມບັດຂອງມໍເຕີສະເຕບ, ມໍເຕີແປງ ແລະ ມໍເຕີແບບບໍ່ໃຊ້ແປງ.
| ມໍເຕີສະເຕບເປີ | ມໍເຕີແປງ | ມໍເຕີທີ່ບໍ່ມີແປງ | |
| ວິທີການໝຸນ | ວົງຈອນຂັບຖືກນໍາໃຊ້ເພື່ອກໍານົດລໍາດັບຂອງແຕ່ລະໄລຍະ (ລວມທັງສອງໄລຍະ, ສາມໄລຍະ ແລະ ຫ້າໄລຍະ) ຂອງຂົດລວດກະດິ່ງ. | ກະແສໄຟຟ້າແບບກະດາດຖືກປ່ຽນຜ່ານກົນໄກການແກ້ໄຂແບບເລື່ອນຂອງແປງ ແລະ ຕົວສະຫຼັບກະແສໄຟຟ້າ. | ການໃຊ້ແປງທີ່ບໍ່ມີແປງສາມາດປ່ຽນໄດ້ໂດຍການປ່ຽນແປງ ແລະ ຕົວປ່ຽນດ້ວຍເຊັນເຊີຕຳແໜ່ງຂົ້ວແມ່ເຫຼັກ ແລະ ສະວິດເຄິ່ງຕົວນຳ. |
| ວົງຈອນຂັບ | ຕ້ອງການ | ທີ່ບໍ່ຕ້ອງການ | ຕ້ອງການ |
| ແຮງບິດ | ແຮງບິດມີຂະໜາດໃຫຍ່ພໍສົມຄວນ. (ໂດຍສະເພາະແຮງບິດທີ່ຄວາມໄວຕ່ຳ) | ແຮງບິດເລີ່ມຕົ້ນມີຂະໜາດໃຫຍ່, ແລະ ແຮງບິດແມ່ນສັດສ່ວນກັບກະແສໄຟຟ້າຂອງກະບອກ. (ແຮງບິດມີຂະໜາດໃຫຍ່ພໍສົມຄວນທີ່ຄວາມໄວປານກາງຫາສູງ) | |
| ຄວາມໄວໃນການໝຸນ | ແຮງບິດມີຂະໜາດໃຫຍ່ພໍສົມຄວນ. (ໂດຍສະເພາະແຮງບິດທີ່ຄວາມໄວຕ່ຳ) | ມັນເປັນສັດສ່ວນກັບແຮງດັນທີ່ໃຊ້ກັບອາມາເຈີ. ຄວາມໄວຫຼຸດລົງຕາມການເພີ່ມຂຶ້ນຂອງແຮງບິດໂຫຼດ | |
| ການຫມຸນຄວາມໄວສູງ | ມັນເປັນສັດສ່ວນກັບຄວາມຖີ່ຂອງກຳມະຈອນປ້ອນຂໍ້ມູນ. ອອກຈາກພື້ນທີ່ຂັ້ນຕອນໃນລະດັບຄວາມໄວຕ່ຳ, ມັນຍາກທີ່ຈະໝຸນດ້ວຍຄວາມໄວສູງ (ມັນຕ້ອງຊ້າລົງ) | ເນື່ອງຈາກຂໍ້ຈຳກັດຂອງກົນໄກການປັບຄວາມຖີ່ຂອງແປງ ແລະ ຕົວປ່ຽນກະແສໄຟຟ້າ, ຄວາມໄວສູງສຸດສາມາດບັນລຸໄດ້ຫຼາຍພັນຮອບຕໍ່ນາທີ | ສູງເຖິງຫຼາຍພັນຫາຫຼາຍສິບພັນຮອບຕໍ່ນາທີ |
| ຊີວິດໝູນວຽນ | ມັນຖືກກຳນົດໂດຍອາຍຸການໃຊ້ງານ. ຫຼາຍສິບພັນຊົ່ວໂມງ | ຈຳກັດໂດຍການສວມໃສ່ຂອງແປງ ແລະ ຕົວປ່ຽນສັນຍານ. ຫຼາຍຮ້ອຍຫາຫຼາຍພັນຊົ່ວໂມງ | ມັນຖືກກຳນົດໂດຍອາຍຸການໃຊ້ງານ. ຫຼາຍສິບພັນຫາຫຼາຍຮ້ອຍພັນຊົ່ວໂມງ |
| ວິທີການຫມຸນໄປໜ້າ ແລະ ຖອຍຫຼັງ | ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະຕ້ອງປ່ຽນລໍາດັບຂອງໄລຍະການກະຕຸ້ນຂອງວົງຈອນຂັບ | ປີ້ນກັບຂົ້ວຂອງແຮງດັນຂອງ pin | ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະຕ້ອງປ່ຽນລໍາດັບຂອງໄລຍະການກະຕຸ້ນຂອງວົງຈອນຂັບ |
| ການຄວບຄຸມໄດ້ | ການຄວບຄຸມຄວາມໄວ ແລະ ຕຳແໜ່ງການໝຸນແບບວົງວຽນເປີດ (ປະລິມານການໝຸນ) ທີ່ກຳນົດໂດຍກຳມະຈອນຄຳສັ່ງສາມາດເຮັດໄດ້ (ແຕ່ມີບັນຫາກ່ຽວກັບການອອກນອກຂັ້ນຕອນ) | ການໝຸນດ້ວຍຄວາມໄວຄົງທີ່ຮຽກຮ້ອງໃຫ້ມີການຄວບຄຸມຄວາມໄວ (ການຄວບຄຸມການປ້ອນຂໍ້ມູນໂດຍໃຊ້ເຊັນເຊີຄວາມໄວ). ເນື່ອງຈາກແຮງບິດແມ່ນສັດສ່ວນກັບກະແສໄຟຟ້າ, ການຄວບຄຸມແຮງບິດຈຶ່ງງ່າຍ | |
| ມັນງ່າຍທີ່ຈະໄດ້ຮັບມັນໄດ້ແນວໃດ | ງ່າຍໆ: ມີຫຼາຍຊະນິດ | ງ່າຍ: ຜູ້ຜະລິດ ແລະ ຫຼາກຫຼາຍຊະນິດ, ມີຫຼາຍທາງເລືອກ | ຄວາມຫຍຸ້ງຍາກ: ສ່ວນໃຫຍ່ແມ່ນມໍເຕີພິເສດສຳລັບການນຳໃຊ້ສະເພາະ |
| ລາຄາ | ຖ້າລວມວົງຈອນຂັບແລ້ວ, ລາຄາຈະແພງ. ລາຄາຖືກກວ່າມໍເຕີແບບບໍ່ມີແປງ | ມໍເຕີທີ່ບໍ່ມີແກນມີລາຄາຖືກເລັກນ້ອຍເນື່ອງຈາກການຍົກລະດັບແມ່ເຫຼັກ. | ຖ້າລວມວົງຈອນຂັບແລ້ວ, ລາຄາກໍ່ແພງ. |
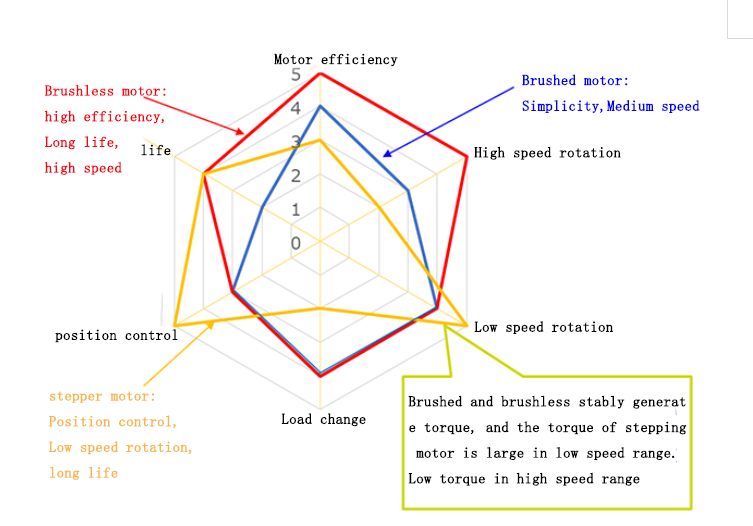
ການປຽບທຽບປະສິດທິພາບຂອງມໍເຕີຂະໜາດນ້ອຍຕາຕະລາງ radar ລະບຸການປຽບທຽບປະສິດທິພາບຂອງມໍເຕີຂະໜາດນ້ອຍຕ່າງໆ.
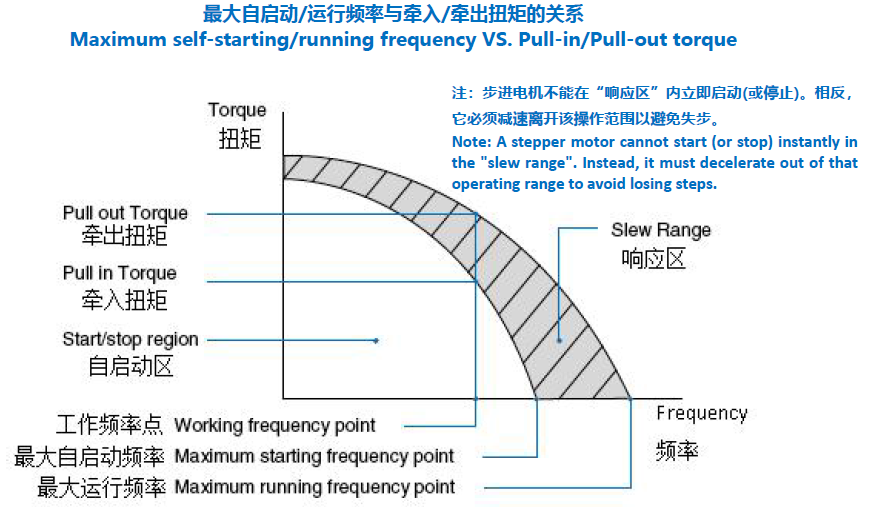
ຄຸນລັກສະນະແຮງບິດຄວາມໄວຂອງມໍເຕີສະເຕບເຕີຂະໜາດນ້ອຍ: ຂອບເຂດການເຮັດວຽກອ້າງອີງ (ກະແສໄຟຟ້າຄົງທີ່)
● ການເຮັດວຽກຕໍ່ເນື່ອງ (ຈັດອັນດັບ): ຮັກສາປະມານ 30% ຂອງແຮງບິດໃນພື້ນທີ່ເລີ່ມຕົ້ນດ້ວຍຕົນເອງ ແລະ ຢູ່ນອກພື້ນທີ່ຂັ້ນໄດ.
● ການເຮັດວຽກໄລຍະສັ້ນ (ລະດັບເວລາສັ້ນໆ): ຮັກສາແຮງບິດໃຫ້ຢູ່ໃນລະດັບປະມານ 50%~60% ໃນພື້ນທີ່ເລີ່ມຕົ້ນດ້ວຍຕົນເອງ ແລະ ພື້ນທີ່ຢູ່ນອກຂັ້ນໄດ.
● ອຸນຫະພູມເພີ່ມຂຶ້ນ: ຕອບສະໜອງຄວາມຕ້ອງການຂອງຊັ້ນການສນວນກັນຄວາມຮ້ອນຂອງມໍເຕີພາຍໃຕ້ລະດັບການໂຫຼດຂ້າງເທິງ ແລະ ສະພາບແວດລ້ອມການບໍລິການ
ສະຫຼຸບຈຸດສຳຄັນ:
1) ເມື່ອເລືອກມໍເຕີເຊັ່ນ: ມໍເຕີແປງ, ມໍເຕີສະເຕບ ແລະ ມໍເຕີແບບບໍ່ໃຊ້ແປງ, ຄຸນລັກສະນະ, ປະສິດທິພາບ ແລະ ຜົນການປຽບທຽບລັກສະນະຂອງມໍເຕີຂະໜາດນ້ອຍສາມາດໃຊ້ເປັນເອກະສານອ້າງອີງສຳລັບການເລືອກມໍເຕີ.
2) ເມື່ອເລືອກມໍເຕີເຊັ່ນ: ມໍເຕີແປງ, ມໍເຕີສະເຕບ ແລະ ມໍເຕີແບບບໍ່ໃຊ້ແປງ, ມໍເຕີປະເພດດຽວກັນມີຫຼາຍລາຍລະອຽດ, ສະນັ້ນຜົນການປຽບທຽບຄຸນລັກສະນະ, ປະສິດທິພາບ ແລະ ລັກສະນະຂອງມໍເຕີຂະໜາດນ້ອຍແມ່ນເພື່ອອ້າງອີງເທົ່ານັ້ນ.
3) ເມື່ອເລືອກມໍເຕີເຊັ່ນ: ມໍເຕີແປງ, ມໍເຕີສະເຕບ ແລະ ມໍເຕີແປງ, ຂໍ້ມູນລະອຽດຕ້ອງໄດ້ຮັບການຢືນຢັນຜ່ານສະເປັກທາງເທັກນິກຂອງແຕ່ລະມໍເຕີ.
ເວລາໂພສ: ມັງກອນ 30-2023