ເມື່ອອອກແບບອຸປະກອນໂດຍໃຊ້ມໍເຕີ, ແນ່ນອນ, ມັນ ຈຳ ເປັນຕ້ອງເລືອກມໍເຕີທີ່ ເໝາະ ສົມທີ່ສຸດ ສຳ ລັບວຽກທີ່ຕ້ອງການ.ເອກະສານນີ້ຈະປຽບທຽບຄຸນລັກສະນະ, ປະສິດທິພາບແລະຄຸນລັກສະນະຂອງມໍເຕີແປງ, ມໍເຕີຂັ້ນຕອນແລະມໍເຕີທີ່ບໍ່ມີແປງ, ຫວັງວ່າຈະເປັນເອກະສານອ້າງອີງສໍາລັບທຸກຄົນໃນເວລາເລືອກມໍເຕີ.ຢ່າງໃດກໍຕາມ, ເນື່ອງຈາກວ່າມີຫຼາຍສະເພາະໃນປະເພດດຽວກັນຂອງມໍເຕີ, ກະລຸນາໃຊ້ພວກມັນສໍາລັບການອ້າງອີງເທົ່ານັ້ນ.ສຸດທ້າຍ, ມັນເປັນສິ່ງຈໍາເປັນເພື່ອຢືນຢັນຂໍ້ມູນລະອຽດໂດຍຜ່ານຂໍ້ກໍານົດດ້ານວິຊາການຂອງແຕ່ລະມໍເຕີ.
ຄຸນນະສົມບັດຂອງມໍເຕີຂະຫນາດນ້ອຍ: ຕາຕະລາງຕໍ່ໄປນີ້ສະຫຼຸບລັກສະນະຂອງມໍເຕີ stepping, motor brush ແລະ motor brushless.
| ມໍເຕີ stepper | ມໍເຕີແປງ | ມໍເຕີທີ່ບໍ່ມີແປງ | |
| ວິທີການຫມຸນ | ວົງຈອນຂັບຖືກນໍາໃຊ້ເພື່ອກໍານົດຄໍາສັ່ງຂອງແຕ່ລະໄລຍະ (ລວມທັງສອງໄລຍະ, ສາມໄລຍະແລະຫ້າໄລຍະ) ຂອງ winding armature.
| ປັດຈຸບັນ armature ແມ່ນ switched ຜ່ານ sliding contact rectifier ກົນໄກຂອງແປງແລະ commutator. | Brushless ແມ່ນຮັບຮູ້ໂດຍການປ່ຽນແປງແປງແລະເຄື່ອງປ່ຽນດ້ວຍເຊັນເຊີຕໍາແຫນ່ງເສົາແມ່ເຫຼັກແລະສະຫຼັບ semiconductor.
|
| ວົງຈອນຂັບ | ຕ້ອງການ | ທີ່ບໍ່ຕ້ອງການ | ຕ້ອງການ |
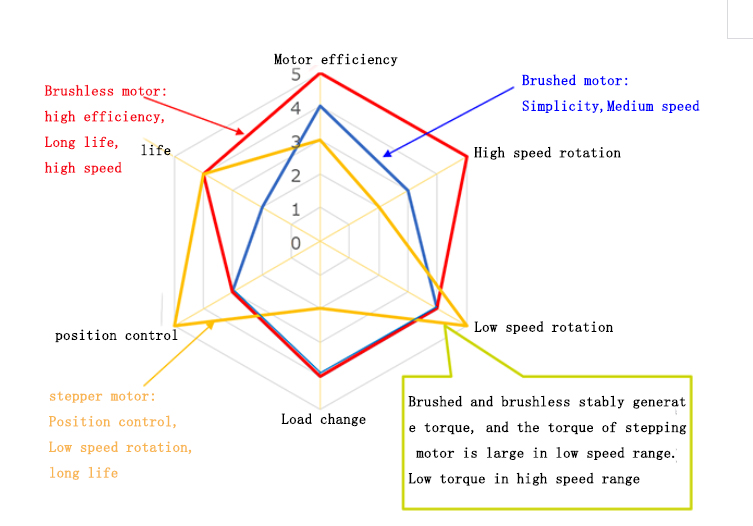
| ແຮງບິດ | ແຮງບິດແມ່ນຂ້ອນຂ້າງໃຫຍ່.(ໂດຍສະເພາະແມ່ນ torque ໃນຄວາມໄວຕ່ໍາ)
| ແຮງບິດເລີ່ມຕົ້ນແມ່ນຂະຫນາດໃຫຍ່, ແລະແຮງບິດແມ່ນອັດຕາສ່ວນກັບປະຈຸບັນຂອງ armature.(ແຮງບິດແມ່ນຂ້ອນຂ້າງໃຫຍ່ຢູ່ທີ່ຄວາມໄວປານກາງຫາສູງ) | |
| ຄວາມໄວຫມຸນ | ແຮງບິດແມ່ນຂ້ອນຂ້າງໃຫຍ່.(ໂດຍສະເພາະແມ່ນ torque ໃນຄວາມໄວຕ່ໍາ)
| ມັນແມ່ນອັດຕາສ່ວນກັບແຮງດັນໄຟຟ້າທີ່ໃຊ້ກັບ armature.ຄວາມໄວຫຼຸດລົງດ້ວຍການເພີ່ມຂຶ້ນຂອງແຮງບິດໂຫຼດ | |
| ການຫມຸນຄວາມໄວສູງ | ມັນເປັນອັດຕາສ່ວນກັບຄວາມຖີ່ຂອງກໍາມະຈອນປ້ອນຂໍ້ມູນ.ອອກຈາກພື້ນທີ່ຂັ້ນຕອນໃນລະດັບຄວາມໄວຕ່ໍາ, ມັນເປັນການຍາກທີ່ຈະ rotate ໃນຄວາມໄວສູງ (ມັນຈໍາເປັນຕ້ອງຊ້າລົງ) | ເນື່ອງຈາກການຈໍາກັດຂອງກົນໄກ rectifier ຂອງແປງແລະ commutator, ຄວາມໄວສູງສຸດສາມາດບັນລຸຫຼາຍພັນ rpm. | ເຖິງຫຼາຍພັນຫາສິບພັນ rpm
|
| ຊີວິດໝູນວຽນ | ມັນຖືກກໍານົດໂດຍຊີວິດທີ່ຮັບຜິດຊອບ.ຫລາຍສິບພັນຊົ່ວໂມງ
| ຈໍາກັດໂດຍການໃສ່ແປງແລະເຄື່ອງແລກປ່ຽນ.ຫຼາຍຮ້ອຍຫາພັນຊົ່ວໂມງ
| ມັນຖືກກໍານົດໂດຍຊີວິດທີ່ຮັບຜິດຊອບ.ຫຼາຍສິບພັນຫາຫຼາຍຮ້ອຍພັນຊົ່ວໂມງ
|
| ວິທີການຫມຸນໄປຂ້າງຫນ້າແລະປີ້ນກັບກັນ | ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະປ່ຽນລໍາດັບຂອງໄລຍະຄວາມຕື່ນເຕັ້ນຂອງວົງຈອນຂັບ
| ປີ້ນກັບຂົ້ວຂອງແຮງດັນ pin
| ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະປ່ຽນລໍາດັບຂອງໄລຍະຄວາມຕື່ນເຕັ້ນຂອງວົງຈອນຂັບ
|
| ການຄວບຄຸມ | ການຄວບຄຸມ loop ເປີດຂອງຄວາມໄວການຫມູນວຽນແລະຕໍາແຫນ່ງ (ຈໍານວນການຫມຸນ) ການກໍານົດໂດຍກໍາມະຈອນຄໍາສັ່ງສາມາດໄດ້ຮັບການປະຕິບັດ (ແຕ່ມີບັນຫາຂອງການອອກຈາກຂັ້ນຕອນ) | ການຫມຸນຄວາມໄວຄົງທີ່ຮຽກຮ້ອງໃຫ້ມີການຄວບຄຸມຄວາມໄວ (ການຄວບຄຸມການຕິຊົມໂດຍໃຊ້ເຊັນເຊີຄວາມໄວ).ເນື່ອງຈາກ torque ແມ່ນອັດຕາສ່ວນກັບປະຈຸບັນ, ການຄວບຄຸມ torque ແມ່ນງ່າຍ | |
| ມັນງ່າຍແນວໃດທີ່ຈະໄດ້ຮັບ | ງ່າຍ: ມີຫຼາຍຊະນິດ | ງ່າຍ: ຫຼາຍຜູ້ຜະລິດແລະແນວພັນ, ທາງເລືອກຫຼາຍ
| ຄວາມຫຍຸ້ງຍາກ: ສ່ວນໃຫຍ່ແມ່ນມໍເຕີພິເສດສໍາລັບຄໍາຮ້ອງສະຫມັກສະເພາະ |
| ລາຄາ | ຖ້າລວມເອົາວົງຈອນໄດເວີ, ລາຄາກໍ່ແພງ.ລາຄາຖືກກວ່າ motorless brush
| ຂ້ອນຂ້າງລາຄາຖືກ, motorless coreless ແມ່ນລາຄາແພງເລັກນ້ອຍເນື່ອງຈາກການຍົກລະດັບແມ່ເຫຼັກຂອງຕົນ. | ຖ້າລວມເອົາວົງຈອນໄດເວີ, ລາຄາກໍ່ແພງ.
|
ການປຽບທຽບປະສິດທິພາບຂອງມໍເຕີຈຸລະພາກ: ຕາຕະລາງ radar ລາຍຊື່ການປຽບທຽບປະສິດທິພາບຂອງມໍເຕີຂະຫນາດນ້ອຍຕ່າງໆ.
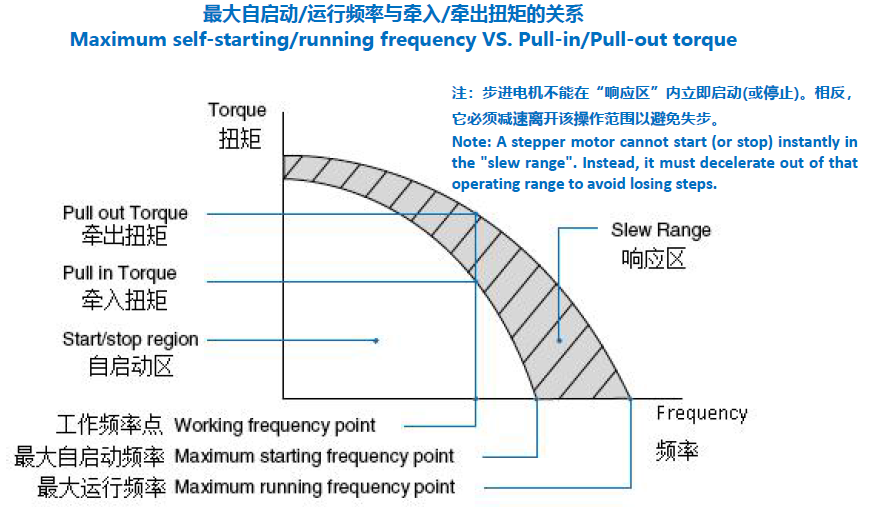
ຄຸນລັກສະນະຂອງແຮງບິດຄວາມໄວຂອງ micro stepping motor: ການອ້າງອີງຂອບເຂດການເຮັດວຽກ (ຂັບໃນປັດຈຸບັນຄົງທີ່)
● ການດໍາເນີນງານຢ່າງຕໍ່ເນື່ອງ (ຈັດອັນດັບ): ຮັກສາປະມານ 30% ຂອງແຮງບິດຢູ່ໃນພື້ນທີ່ເລີ່ມຕົ້ນດ້ວຍຕົນເອງແລະອອກຈາກພື້ນທີ່ຂັ້ນຕອນ.
● ການປະຕິບັດທີ່ໃຊ້ເວລາສັ້ນ (ອັນດັບທີ່ໃຊ້ເວລາສັ້ນ): ຮັກສາແຮງບິດຢູ່ໃນລະດັບຂອງປະມານ 50% ~ 60% ໃນພື້ນທີ່ເລີ່ມຕົ້ນຂອງຕົນເອງແລະອອກຈາກພື້ນທີ່ຂັ້ນຕອນ.
● ການເພີ່ມອຸນຫະພູມ: ຕອບສະຫນອງຄວາມຮຽກຮ້ອງຕ້ອງການຂອງຊັ້ນ insulation ຂອງມໍເຕີພາຍໃຕ້ລະດັບການໂຫຼດຂ້າງເທິງນີ້ແລະສະພາບແວດລ້ອມການບໍລິການ
ສະຫຼຸບຈຸດສໍາຄັນ:
1) ໃນເວລາທີ່ເລືອກ motors ເຊັ່ນ: motor brush, step motor ແລະ brushless motor, ລັກສະນະ, ປະສິດທິພາບແລະລັກສະນະການປຽບທຽບຜົນໄດ້ຮັບຂອງ motors ຂະຫນາດນ້ອຍສາມາດນໍາໃຊ້ເປັນເອກະສານອ້າງອີງສໍາລັບການເລືອກ motor.
2) ໃນເວລາທີ່ເລືອກ motors ເຊັ່ນ: motor brush, step motor ແລະ brushless motors, motors ຂອງປະເພດດຽວກັນປະກອບມີຫຼາຍສະເພາະ, ດັ່ງນັ້ນຜົນໄດ້ຮັບການປຽບທຽບຂອງລັກສະນະ, ປະສິດທິພາບແລະລັກສະນະຂອງ motors ຂະຫນາດນ້ອຍແມ່ນພຽງແຕ່ສໍາລັບການອ້າງອິງ.
3) ໃນເວລາທີ່ເລືອກມໍເຕີເຊັ່ນ: ມໍເຕີແປງ, ມໍເຕີຂັ້ນຕອນແລະມໍເຕີ brushless, ຂໍ້ມູນລາຍລະອຽດຕ້ອງໄດ້ຮັບການຢືນຢັນຜ່ານທາງວິຊາການຂອງແຕ່ລະມໍເຕີ.
ເວລາປະກາດ: ມັງກອນ-04-2023