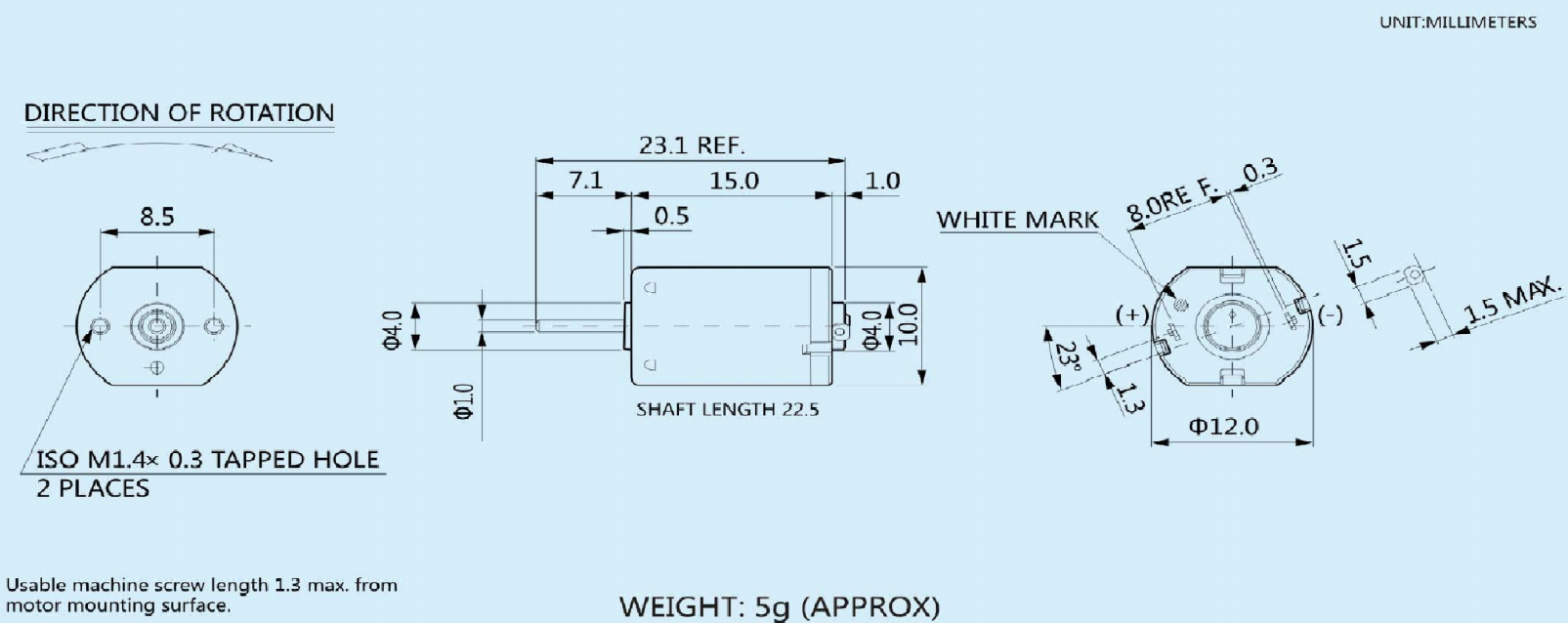
ມໍເຕີ DC N20ຮູບແຕ້ມ (ມໍເຕີ DC N20 ມີເສັ້ນຜ່າສູນກາງ 12 ມມ, ໜາ 10 ມມ ແລະ ຍາວ 15 ມມ, ຍາວກວ່າແມ່ນ N30 ແລະ ສັ້ນກວ່າແມ່ນ N10)

ມໍເຕີ DC N20ພາລາມິເຕີ.
ປະສິດທິພາບ:
1. ປະເພດມໍເຕີ: ມໍເຕີ DC ແປງ
2. ແຮງດັນ: 3V-12VDC
3. ຄວາມໄວໝູນ (ບໍ່ເຮັດວຽກ): 3000rpm-20000rpm
4. ແຮງບິດ: 1g.cm-2g.cm
5. ເສັ້ນຜ່າສູນກາງເພົາ: 1.0 ມມ
6. ທິດທາງ: CW/ CCW
7. ແບຣິ່ງເພົາອອກ: ແບຣິ່ງນ້ຳມັນ
8. ລາຍການທີ່ສາມາດປັບແຕ່ງໄດ້: ຄວາມຍາວຂອງເພົາ (ເພົາສາມາດຕິດຕັ້ງຕົວເຂົ້າລະຫັດໄດ້), ແຮງດັນ, ຄວາມໄວ, ວິທີການອອກສາຍ, ແລະຕົວເຊື່ອມຕໍ່, ແລະອື່ນໆ.
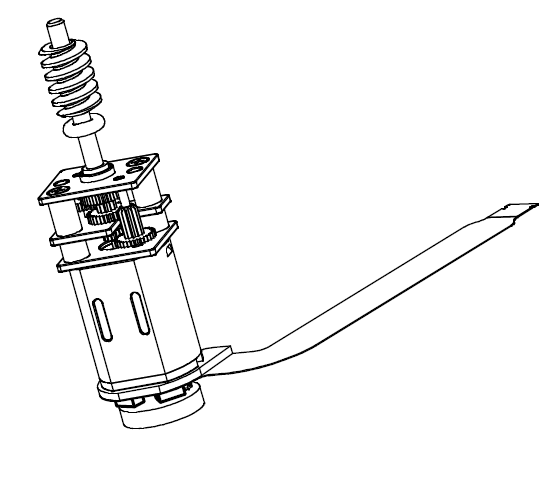
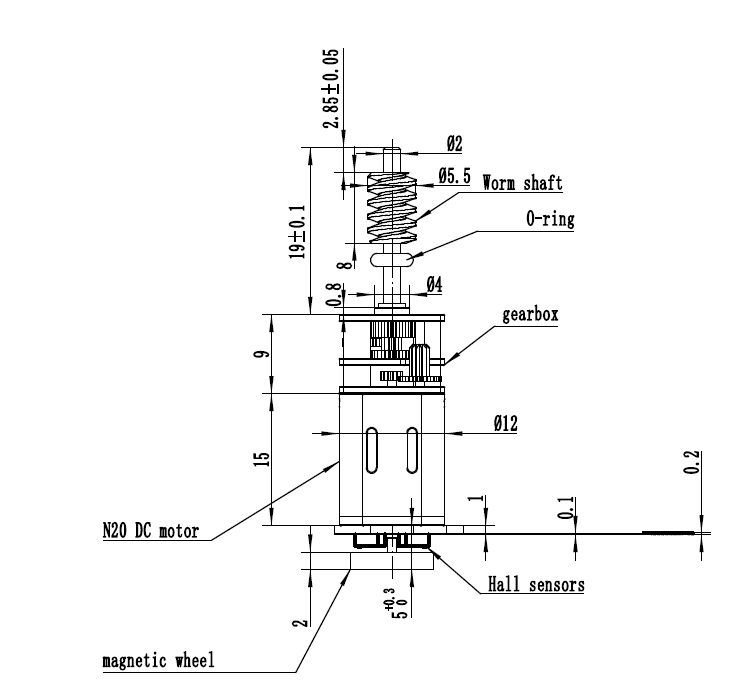
ຜະລິດຕະພັນຕາມໃຈລູກຄ້າມໍເຕີ DC N20 ກໍລະນີຕົວຈິງ (Transformers)
ມໍເຕີ N20 DC + ກ່ອງເກຍ + ເພົາໜອນ + ຕົວເຂົ້າລະຫັດດ້ານລຸ່ມ + FPC ແບບກຳນົດເອງ + ແຫວນຢາງຢູ່ເທິງເພົາ
ເສັ້ນໂຄ້ງປະສິດທິພາບຂອງມໍເຕີ DC N20 (ລຸ້ນຄວາມໄວບໍ່ມີການໂຫຼດ 12V 16000).
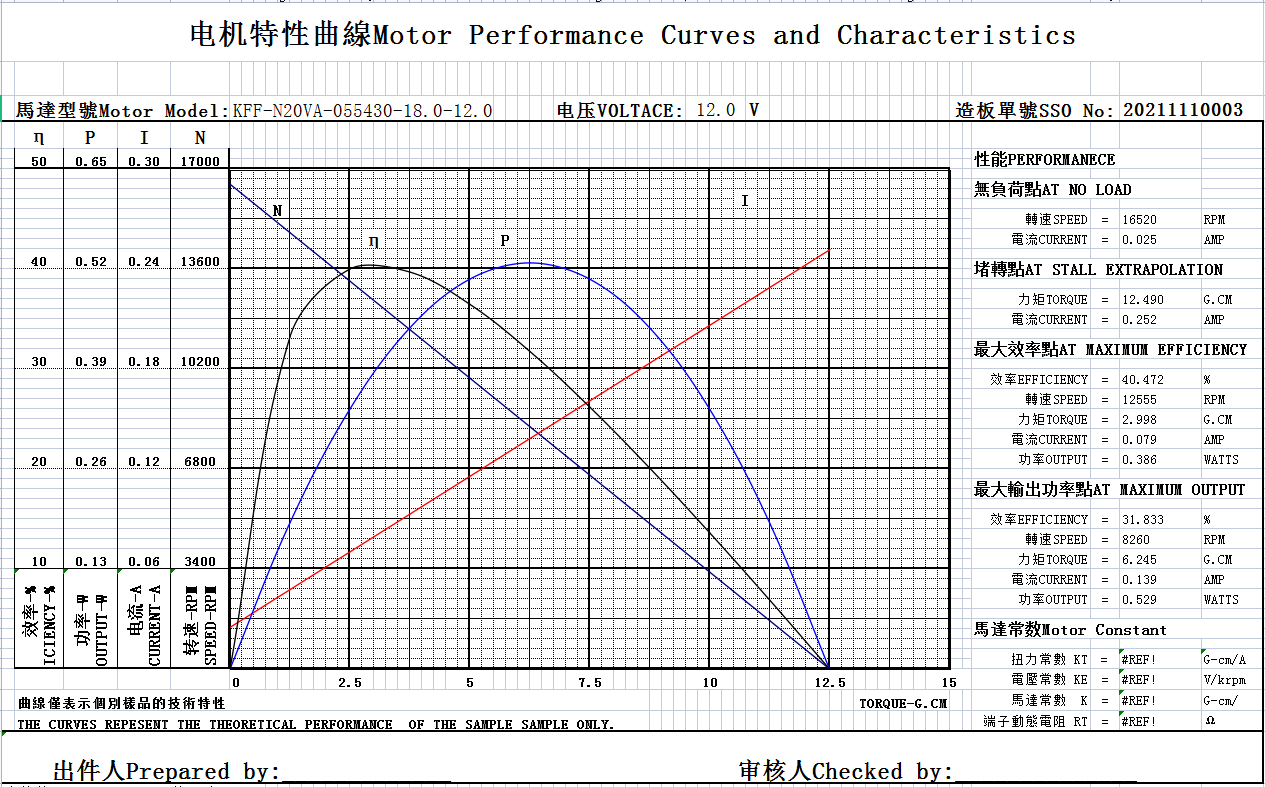
ລັກສະນະ ແລະ ວິທີການທົດສອບຂອງມໍເຕີ DC.
1. ທີ່ແຮງດັນໄຟຟ້າທີ່ຖືກກຳນົດ, ຄວາມໄວທີ່ໄວທີ່ສຸດ, ກະແສໄຟຟ້າຕໍ່າສຸດ, ເມື່ອການໂຫຼດເພີ່ມຂຶ້ນ, ຄວາມໄວຈະຫຼຸດລົງເລື້ອຍໆ, ກະແສໄຟຟ້າຈະໃຫຍ່ຂຶ້ນເລື້ອຍໆ, ຈົນກວ່າມໍເຕີຈະຖືກບລັອກ, ຄວາມໄວຂອງມໍເຕີຈະກາຍເປັນ 0, ກະແສໄຟຟ້າສູງສຸດ
2. ແຮງດັນໄຟຟ້າສູງຂຶ້ນ, ຄວາມໄວຂອງມໍເຕີຈະໄວຂຶ້ນ
ມາດຕະຖານການກວດກາການຂົນສົ່ງທົ່ວໄປ.
ການທົດສອບຄວາມໄວໃນລະຫວ່າງການໂຫຼດ: ຕົວຢ່າງ, ພະລັງງານທີ່ກຳນົດໄວ້ 12V, ຄວາມໄວໃນລະຫວ່າງການໂຫຼດ 16000RPM.
ມາດຕະຖານການທົດສອບທີ່ບໍ່ມີການໂຫຼດຄວນຢູ່ລະຫວ່າງ 14400 ~ 17600 RPM (ຄວາມຜິດພາດ 10%), ຖ້າບໍ່ດັ່ງນັ້ນມັນຈະບໍ່ດີ
ຕົວຢ່າງ: ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດຄວນຈະຢູ່ພາຍໃນ 30mA, ຖ້າບໍ່ດັ່ງນັ້ນມັນຈະບໍ່ດີ
ບວກກັບການໂຫຼດທີ່ລະບຸໄວ້, ຄວາມໄວຄວນຈະສູງກວ່າຄວາມໄວທີ່ລະບຸໄວ້.
ຕົວຢ່າງ: ມໍເຕີ DC N20 ທີ່ມີກ່ອງເກຍ 298:1, ນ້ຳໜັກ 500g*cm, RPM ຄວນຈະສູງກວ່າ 11500RPM. ຖ້າບໍ່ດັ່ງນັ້ນ, ມັນຈະບໍ່ດີ
ຂໍ້ມູນການທົດສອບຕົວຈິງຂອງມໍເຕີເກຍ N20 DC.
ວັນທີທົດສອບ: ວັນທີ 13 ພະຈິກ 2022
ຜູ້ທົດສອບ: Tony, ວິສະວະກອນ Vikotec
ສະຖານທີ່ທົດສອບ: ໂຮງງານ Vikotec
ຜະລິດຕະພັນ: ມໍເຕີ DC N20 + ກ່ອງເກຍ
ແຮງດັນທົດສອບ: 12V
ຄວາມໄວໃນການໂຫຼດທີ່ໝາຍໂດຍມໍເຕີ: 16000RPM
ກຸ່ມ: ກຸ່ມທີສອງໃນເດືອນກໍລະກົດ
ອັດຕາສ່ວນການຫຼຸດຜ່ອນ: 298: 1
ຄວາມຕ້ານທານ: 47.8Ω
ຄວາມໄວໃນການໂຫຼດໂດຍບໍ່ມີເກຍ: 16508RPM
ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດ: 15mA
| ໝາຍເລກລຳດັບ | ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດ (mA) | ຄວາມໄວໃນການບໍ່ຕ້ອງໂຫຼດ(ຮອບຕໍ່ນາທີ) | 500 ກຣາມ*ຊມກະແສໄຟຟ້າໂຫຼດ (mA) | ຄວາມໄວໃນການໂຫຼດ 500g*cm(ຮອບຕໍ່ນາທີ) | ສະກັດກັ້ນກະແສໄຟຟ້າ(ຮອບຕໍ່ນາທີ) |
| 1 | 16 | 16390 | 59 | 12800 | 215 |
| 2 | 18 | 16200 | 67 | 12400 | 234 |
| 3 | 18 | 16200 | 67 | 12380 | 220 |
| 4 | 20 | 16080 | 62 | 12400 | 228 |
| 5 | 17 | 16400 | 68 | 12420 | 231 |
| ຄ່າສະເລ່ຍ | 18 | 16254 | 65 | 12480 | 226 |
ກຸ່ມ: ກຸ່ມທີສອງໃນເດືອນກໍລະກົດ
ອັດຕາສ່ວນການຊະລໍຕົວ: 420:1
ຄວາມຕ້ານທານ: 47.8Ω
ຄວາມໄວໃນເວລາບໍ່ມີການໂຫຼດໂດຍບໍ່ມີເກຍ: 16500RPM
ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດ: 15mA
| ໝາຍເລກລຳດັບ | ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດ (mA) | ຄວາມໄວໃນການບໍ່ຕ້ອງໂຫຼດ(ຮອບຕໍ່ນາທີ) | 500 ກຣາມ*ຊມກະແສໄຟຟ້າໂຫຼດ (mA) | ຄວາມໄວໃນການໂຫຼດ 500g*cm(ຮອບຕໍ່ນາທີ) | ສະກັດກັ້ນກະແສໄຟຟ້າ(ຮອບຕໍ່ນາທີ) |
| 1 | 15 | 16680 | 49 | 13960 | 231 |
| 2 | 25 | 15930 | 60 | 13200 | 235 |
| 3 | 19 | 16080 | 57 | 13150 | 230 |
| 4 | 21 | 15800 | 53 | 13300 | 233 |
| 5 | 20 | 16000 | 55 | 13400 | 238 |
| ຄ່າສະເລ່ຍ | 20 | 16098 | 55 | 13402 | 233 |
ກຸ່ມ: ກຸ່ມທີສາມໃນເດືອນກັນຍາ
ອັດຕາສ່ວນການຊະລໍຕົວ: 298:1
ຄວາມຕ້ານທານ: 47.6Ω
ຄວາມໄວໃນການໂຫຼດໂດຍບໍ່ມີເກຍ: 15850RPM
ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດ: 13mA
| ໝາຍເລກລຳດັບ | ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດ (mA) | ຄວາມໄວໃນການບໍ່ຕ້ອງໂຫຼດ(ຮອບຕໍ່ນາທີ) | 500 ກຣາມ*ຊມກະແສໄຟຟ້າໂຫຼດ (mA) | ຄວາມໄວໃນການໂຫຼດ 500g*cm(ຮອບຕໍ່ນາທີ) | ສະກັດກັ້ນກະແສໄຟຟ້າ(ຮອບຕໍ່ນາທີ) |
| 1 | 16 | 15720 | 64 | 12350 | 219 |
| 2 | 18 | 15390 | 63 | 12250 | 200 |
| 3 | 18 | 15330 | 63 | 11900 | 219 |
| 4 | 20 | 15230 | 62 | 12100 | 216 |
| 5 | 18 | 15375 | 61 | 12250 | 228 |
| ຄ່າສະເລ່ຍ | 18 | 15409 | 63 | 12170 | 216 |
ກຸ່ມ: ກຸ່ມທີສາມໃນເດືອນກັນຍາ
ອັດຕາສ່ວນການຫຼຸດຜ່ອນ: 420: 1
ຄວາມຕ້ານທານ: 47.6Ω
ຄວາມໄວໃນການໂຫຼດໂດຍບໍ່ມີເກຍ: 15680RPM
ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດ: 17mA
| ໝາຍເລກລຳດັບ | ກະແສໄຟຟ້າທີ່ບໍ່ມີການໂຫຼດ (mA) | ຄວາມໄວໃນການບໍ່ຕ້ອງໂຫຼດ(ຮອບຕໍ່ນາທີ) | 500 ກຣາມ*ຊມກະແສໄຟຟ້າໂຫຼດ (mA) | ຄວາມໄວໃນການໂຫຼດ 500g*cm(ຮອບຕໍ່ນາທີ) | ສະກັດກັ້ນກະແສໄຟຟ້າ(ຮອບຕໍ່ນາທີ) |
| 1 | 18 | 15615 | 54 | 12980 | 216 |
| 2 | 18 | 15418 | 49 | 13100 | 210 |
| 3 | 18 | 15300 | 50 | 12990 | 219 |
| 4 | 17 | 15270 | 50 | 13000 | 222 |
| 5 | 16 | 15620 | 50 | 13160 | 217 |
| ຄ່າສະເລ່ຍ | 17 | 15445 | 51 | 13046 | 217 |
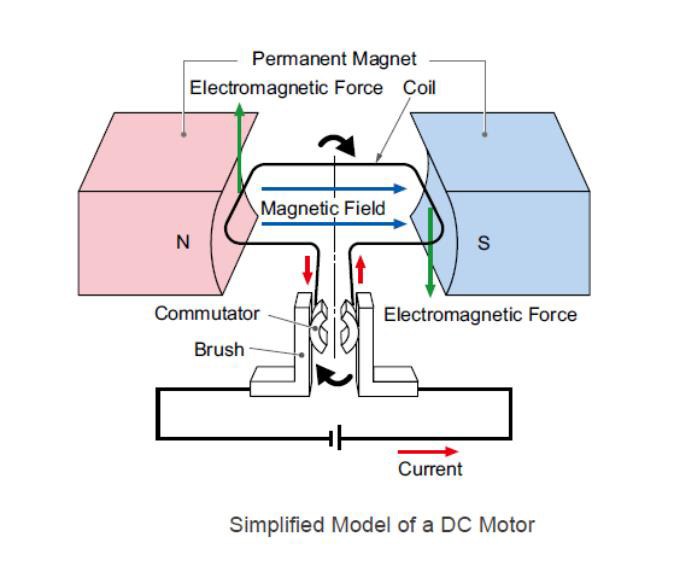
ຫຼັກການເຮັດວຽກຂອງມໍເຕີ DC N20.
ຕົວນຳທີ່ມີພະລັງງານໃນສະໜາມແມ່ເຫຼັກແມ່ນຂຶ້ນກັບແຮງໃນທິດທາງໃດໜຶ່ງ.
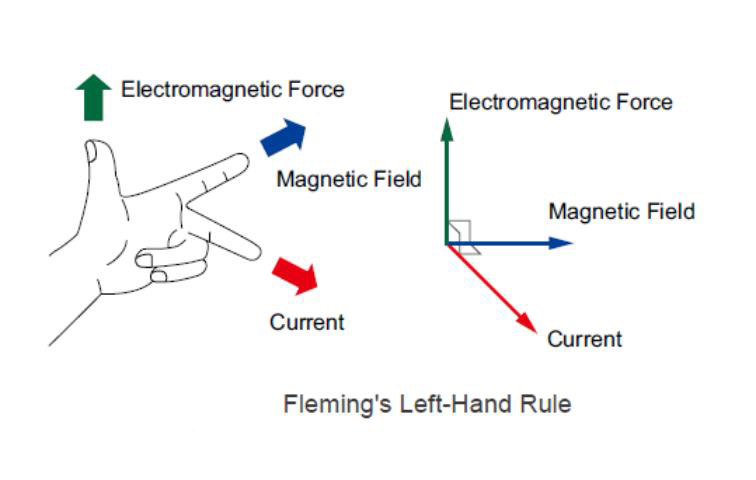
ກົດມືຊ້າຍຂອງ Fleming.
ທິດທາງຂອງສະໜາມແມ່ເຫຼັກແມ່ນນິ້ວຊີ້, ທິດທາງຂອງກະແສໄຟຟ້າແມ່ນນິ້ວກາງ, ແລະ ທິດທາງຂອງແຮງແມ່ນທິດທາງຂອງນິ້ວໂປ້
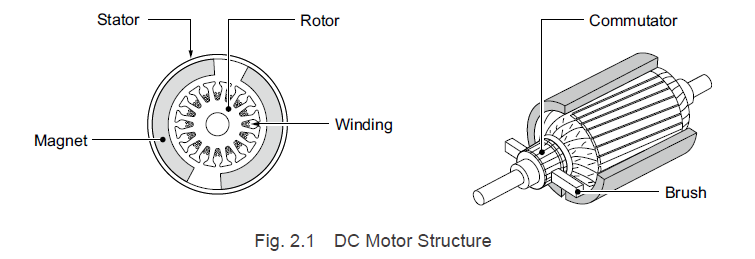
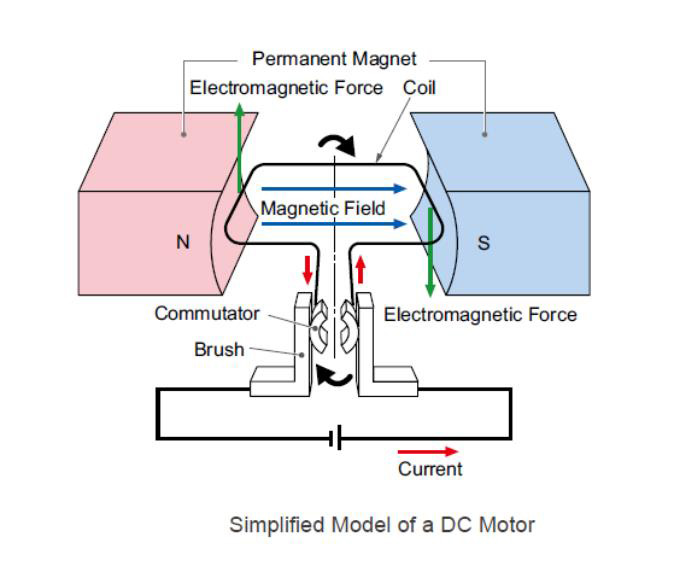
ໂຄງສ້າງພາຍໃນຂອງມໍເຕີ DC N20.
ການວິເຄາະທິດທາງທີ່ rotor (coil) ຖືກກະທົບໃນມໍເຕີ DC1.
ຖ້າຂຶ້ນກັບທິດທາງຂອງແຮງແມ່ເຫຼັກໄຟຟ້າ, ຂົດລວດຈະເຄື່ອນທີ່ຕາມເຂັມໂມງ, ທິດທາງຂອງແຮງແມ່ເຫຼັກໄຟຟ້າທີ່ໃຊ້ກັບສາຍໄຟທາງຊ້າຍ (ຫງາຍໜ້າຂຶ້ນ) ແລະ ທິດທາງຂອງແຮງແມ່ເຫຼັກໄຟຟ້າທີ່ໃຊ້ກັບສາຍໄຟທາງຂວາ (ຫງາຍໜ້າລົງ).
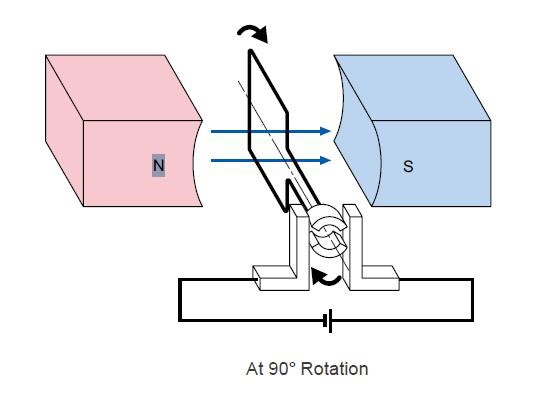
ການວິເຄາະທິດທາງທີ່ rotor (coil) ໃນມໍເຕີຖືກກະທົບ2.
ເມື່ອຂົດລວດຕັ້ງສາກກັບສະໜາມແມ່ເຫຼັກ, ມໍເຕີຈະບໍ່ໄດ້ຮັບແຮງສະໜາມແມ່ເຫຼັກ. ເຖິງຢ່າງໃດກໍ່ຕາມ, ເນື່ອງຈາກຄວາມเฉื่อย, ຂົດລວດຈະສືບຕໍ່ເຄື່ອນທີ່ໄປໄລຍະໜຶ່ງ. ສຳລັບຊ່ວງເວລານີ້, ຕົວປ່ຽນກະແສໄຟຟ້າ ແລະ ແປງຈະບໍ່ຕິດຕໍ່ກັນ. ເມື່ອຂົດລວດສືບຕໍ່ໝຸນຕາມເຂັມໂມງ, ຕົວປ່ຽນກະແສໄຟຟ້າ ແລະ ແປງຈະຕິດຕໍ່ກັນ.ສິ່ງນີ້ຈະເຮັດໃຫ້ທິດທາງຂອງກະແສໄຟຟ້າປ່ຽນໄປ.
ການວິເຄາະທິດທາງທີ່ rotor (coil) ໃນມໍເຕີຖືກກະທົບ 3.
ເນື່ອງຈາກຕົວປ່ຽນກະແສໄຟຟ້າ ແລະ ແປງ, ກະແສໄຟຟ້າຈະປ່ຽນທິດທາງທຸກໆເຄິ່ງຮອບຂອງມໍເຕີ. ດ້ວຍວິທີນີ້, ມໍເຕີຈະສືບຕໍ່ໝຸນຕາມເຂັມໂມງ. ເນື່ອງຈາກຕົວປ່ຽນກະແສໄຟຟ້າ ແລະ ແປງແມ່ນມີຄວາມຈຳເປັນຕໍ່ການເຄື່ອນໄຫວຢ່າງຕໍ່ເນື່ອງຂອງມໍເຕີ, ມໍເຕີ N20 DC ຈຶ່ງຖືກເອີ້ນວ່າ: "ມໍເຕີແປງ"
ທິດທາງຂອງແຮງແມ່ເຫຼັກໄຟຟ້າທີ່ໃຊ້ກັບສາຍໄຟທາງຊ້າຍ (ຫັນໜ້າຂຶ້ນເທິງ) ແລະ ສາຍໄຟທາງຂວາ
ທິດທາງຂອງແຮງແມ່ເຫຼັກໄຟຟ້າ (ຫັນໜ້າລົງ)
ຂໍ້ດີຂອງມໍເຕີ DC N20.
1. ລາຄາຖືກ
2. ຄວາມໄວໝູນໄວ
3. ສາຍໄຟງ່າຍດາຍ, ສອງ pins, ຫນຶ່ງເຊື່ອມຕໍ່ກັບຂັ້ນຕອນບວກ, ຫນຶ່ງເຊື່ອມຕໍ່ກັບຂັ້ນຕອນທາງລົບ, ສຽບແລະຫຼິ້ນ
4. ປະສິດທິພາບຂອງມໍເຕີສູງກວ່າມໍເຕີ stepper
ເວລາໂພສ: ວັນທີ 16 ພະຈິກ 2022