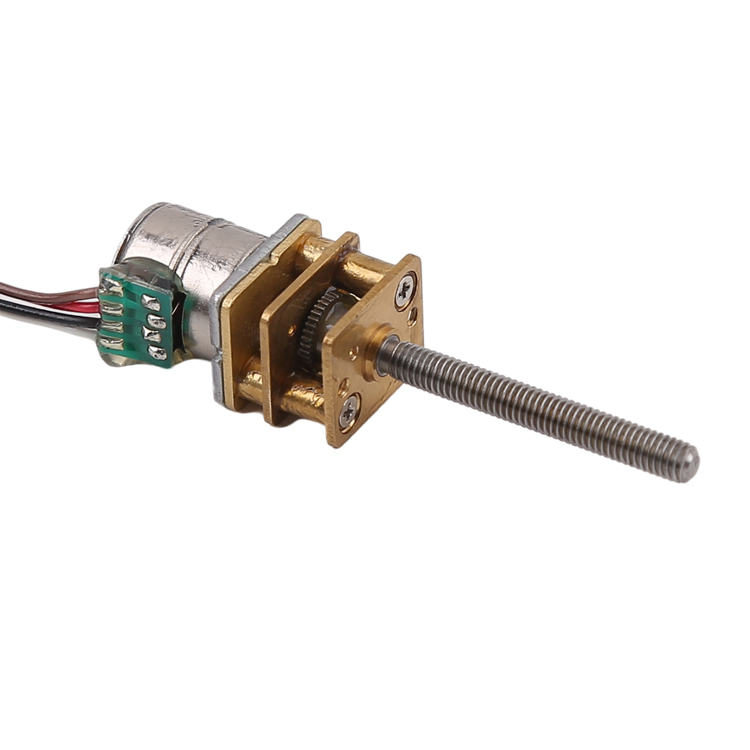
ມໍເຕີເຟືອງຈຸນລະພາກປະກອບດ້ວຍມໍເຕີແລະກ່ອງເກຍ, ມໍເຕີເປັນແຫຼ່ງພະລັງງານ, ຄວາມໄວຂອງມໍເຕີແມ່ນສູງຫຼາຍ, ແຮງບິດແມ່ນຫນ້ອຍຫຼາຍ, ການເຄື່ອນໄຫວຫມຸນຂອງມໍເຕີຖືກສົ່ງໄປຫາເກຍຜ່ານແຂ້ວມໍເຕີ (ລວມທັງແມ່ທ້ອງ) ທີ່ຕິດຢູ່ກັບແກນມໍເຕີ, ດັ່ງນັ້ນ ເພົາມໍເຕີແມ່ນສ່ວນຫນຶ່ງທີ່ມີຄວາມສໍາຄັນຫຼາຍໃນມໍເຕີ micro geared.
I. ວັດສະດຸຂອງເພົາມໍເຕີ
ການເລືອກວັດສະດຸ shaft ຄວນພິຈາລະນາຂະຫນາດ torque, machinability, corrosion resistance, ແລະບໍ່ວ່າຈະເປັນ conductive ສະນະແມ່ເຫຼັກຕາມຄວາມຕ້ອງການຂອງມໍເຕີ, ວັດສະດຸສາມາດໄດ້ຮັບການຄັດເລືອກຈາກເຫຼັກກາກບອນຄຸນນະພາບສູງ, ສະແຕນເລດ, ເຫຼັກໂລຫະປະສົມ, ເຫຼັກ carburized, ແລະອື່ນໆວັດສະດຸ shaft motor ນໍາໃຊ້ທົ່ວໄປແມ່ນປະເພດດັ່ງຕໍ່ໄປນີ້.
1. ເຫຼັກກ້າມາດຕະຖານອາເມລິກາ 1141 & 1144, ວັດສະດຸພາຍໃນທີ່ໃກ້ຄຽງທີ່ສຸດແມ່ນເຫຼັກເລກທີ 45, ວັດສະດຸທີ່ໃຊ້ກັນຢ່າງກວ້າງຂວາງທີ່ສຸດໃນອຸດສາຫະກໍາໃນປະຈຸບັນ. ຂໍ້ເສຍຕົ້ນຕໍແມ່ນວ່າມັນງ່າຍທີ່ຈະເປັນ rust, ສະນັ້ນເມື່ອນໍາໃຊ້, ຈໍາເປັນຕ້ອງໄດ້ນໍາໃຊ້ນ້ໍາມັນປ້ອງກັນ rust ເພີ່ມເຕີມເພື່ອບັນເທົາບັນຫາຂອງ rusting ໄດ້.
2.American Standard 416 ສະແຕນເລດ, ອຸປະກອນການພາຍໃນປະເທດທີ່ໃກ້ຊິດທີ່ສຸດແມ່ນ Y1Cr13. ບໍ່ງ່າຍທີ່ຈະປຸງແຕ່ງ, ບໍ່ເຫມາະສົມສໍາລັບການປຸງແຕ່ງທີ່ມີລັກສະນະສະລັບສັບຊ້ອນ, ເຊັ່ນ: ຫົວ shaft ກັບ threads, ລາຄາແມ່ນລາຄາແພງກວ່າເຫຼັກ 45, ລາຄາຖືກກວ່າ 303, ການນໍາໃຊ້ຢ່າງກວ້າງຂວາງ.
3.American Standard 420 ສະແຕນເລດ, ອຸປະກອນການພາຍໃນປະເທດທີ່ໃກ້ຊິດທີ່ສຸດແມ່ນ 2Cr13. ບໍ່ງ່າຍທີ່ຈະປຸງແຕ່ງ, ບໍ່ເຫມາະສົມສໍາລັບການປຸງແຕ່ງທີ່ມີລັກສະນະສະລັບສັບຊ້ອນ, ເຊັ່ນ: ຫົວ shaft ກັບ thread, ລາຄາແພງກວ່າ 45 ເຫຼັກກ້າ, ລາຄາຖືກກວ່າ 416/303, ການນໍາໃຊ້ຢ່າງກວ້າງຂວາງຫຼາຍ.
4. ສະແຕນເລດມາດຕະຖານອາເມລິກາ 431, ວັດສະດຸນີ້ບໍ່ໄດ້ຖືກນໍາໃຊ້ທົ່ວໄປ, ສ່ວນໃຫຍ່ແມ່ນຢູ່ໃນການຕິດຕໍ່ກັບໂອກາດອາຫານ. ສາມາດຕິດຕໍ່ກັບອາຫານ.
5. ສະແຕນເລດມາດຕະຖານອາເມລິກາ 303, ລາຄາແພງກວ່າ, ມີລັກສະນະອ່ອນໆ, ງ່າຍຕໍ່ການປຸງແຕ່ງເປັນຮູບຮ່າງທີ່ສັບສົນ.
II. ຮູບຮ່າງຂອງ shaft motor ໄດ້
ແຂ້ວມໍເຕີໃນ motor geared ຈຸນລະພາກແລະແຂ້ວລະດັບທໍາອິດໃນຕາຫນ່າງ gearbox ເພື່ອສົ່ງ rotary motion, inevitably ຜະລິດ torque, ສະນັ້ນຄວາມແຫນ້ນຫນາຂອງແຂ້ວ motor ແລະ shaft motor ແມ່ນມີຄວາມສໍາຄັນຫຼາຍ. ພິຈາລະນາແຂ້ວ motor ແລະ motor shaft ເຫມາະ, ພວກເຮົາບໍ່ສາມາດໄດ້ຮັບປະມານຮູບຮ່າງຂອງ shaft motor ໄດ້.
ຮູບຮ່າງຂອງມໍເຕີແມ່ນ
A. shaft ແສງສະຫວ່າງ, ເຫມາະສົມສໍາລັບການໂຫຼດຂະຫນາດນ້ອຍແລະແຮງບິດຂະຫນາດນ້ອຍ.
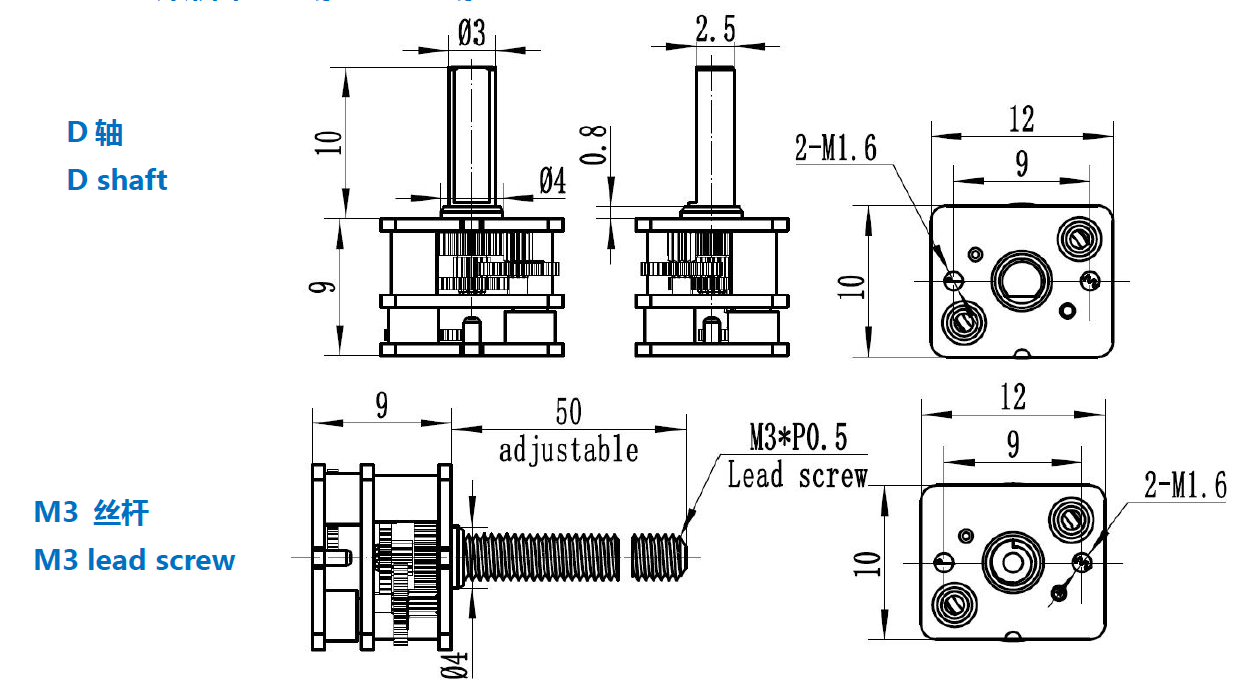
B. shaft ແປຫຼື D-shaft, ເຫມາະສໍາລັບການໂຫຼດຂະຫນາດກາງ.
C. Knurled shaft, ເຫມາະສໍາລັບການໂຫຼດຂະຫນາດກາງ.
D.Rotating shaft ກັບ keyway, ເຫມາະສົມສໍາລັບການໂຫຼດຫນັກແລະແຮງບິດສູງ.
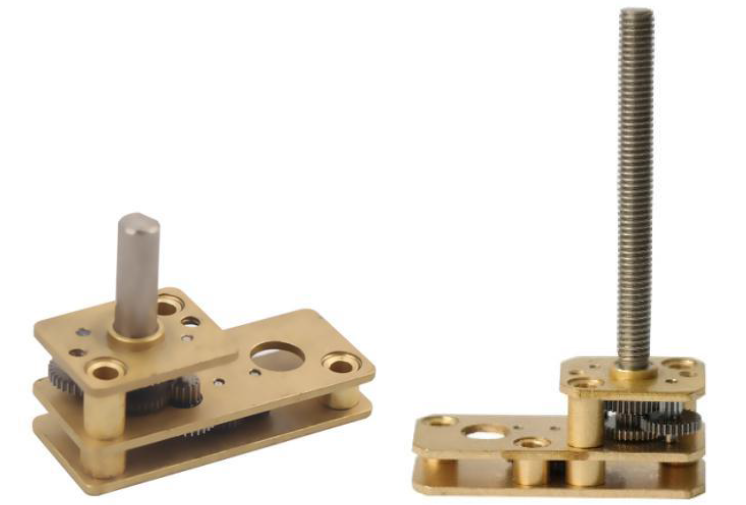
E. The output ຂອງ motor shaft ແມ່ນແມ່ທ້ອງ, ປະເພດຂອງ motor shaft ນີ້ແມ່ນພິເສດ, ສ່ວນຫຼາຍແມ່ນໃຊ້ສໍາລັບ turbo worm drive.
III. ຄວາມຕ້ອງການຂະບວນການຂອງ shaft motor
ມໍເຕີແບບຈຸລະພາກມີຄວາມຕ້ອງການຊີວິດ, ແລະຄວາມຕ້ອງການຂະບວນການຂອງ shaft motor ຍັງມີຜົນກະທົບຊີວິດຂອງ motor geared ຈຸນລະພາກ.
ເຕັກໂນໂລຊີການປຸງແຕ່ງຂອງ motor shaft ມີ.
A.Motor shaft ຂະຫນາດຄວາມຖືກຕ້ອງຂອງຂະຫນາດແມ່ນຂ້ອນຂ້າງສູງ, ສາມາດບັນລຸພາຍໃນ 0.002mm.
B. ໃນຄໍາສັ່ງທີ່ຈະປ້ອງກັນບໍ່ໃຫ້ rust ແລະປັບປຸງການຕໍ່ຕ້ານ corrosion, ດ້ານຂອງ shaft motor ມັກຈະ electroplated ກັບ nickel.
C. roughness ດ້ານຂອງ shaft motor ແມ່ນຍັງມີຄວາມສໍາຄັນຫຼາຍ, ເຊິ່ງມີຜົນກະທົບໂດຍກົງກັບຄວາມແມ່ນຍໍາຂອງເຫມາະກັບແຂ້ວ motor ໄດ້.
IV. ການຈັດປະເພດ shaft ຂັບລົດຜ່ອນຄວາມໄວ
ຕົວຫຼຸດຜ່ອນແມ່ນແບ່ງອອກເປັນຕົວຫຼຸດຜ່ອນພະລັງງານສູງແລະຕົວຫຼຸດຜ່ອນພະລັງງານຕ່ໍາຕາມພະລັງງານ. shaft ຜົນຜະລິດຂອງພະລັງງານຕ່າງໆ, ແບບຈໍາລອງແລະການຫຼຸດຜ່ອນສະເພາະແມ່ນແຕກຕ່າງກັນ, ແລະ shaft ການສົ່ງອອກຂອງ reducer ໄດ້ແບ່ງອອກເປັນ shaft ຜະລິດຕະພັນແລະ input shaft, ແລະຫຼັກການຂອງ shaft ສອງປະເພດແມ່ນໄດ້ນໍາສະເຫນີໃນລາຍລະອຽດຂ້າງລຸ່ມນີ້.
1. ຂາອອກ
shaft ຜົນຜະລິດແມ່ນ shaft ທີ່ເຊື່ອມຕໍ່ກັບການຫຼຸດຜ່ອນແລະກົນໄກການສົ່ງອອກ, ຄວາມໄວການຜະລິດຂອງ shaft ຜົນຜະລິດແມ່ນຊ້າຫຼາຍ, ຕາມການ shaft ຜະລິດຕະພັນການແບ່ງອອກເປັນ shaft ໂລຫະ, shaft ຜົນຜະລິດພາດສະຕິກ; ອີງຕາມຮູບຮ່າງໄດ້ຖືກແບ່ງອອກເປັນ shaft D-shaped customizable, shaft ມົນ, shaft ແປ double, shaft hexagonal, shaft pentagonal, shaft ຮຽບຮ້ອຍ, ແລະອື່ນໆ.
2. ຂາເຂົ້າ
Input shaft ແມ່ນ shaft ການສົ່ງຕໍ່ເຊື່ອມຕໍ່ຂອງມໍເຕີລະບົບສາຍສົ່ງແລະ reducer, ຄວາມໄວການປ້ອນຂໍ້ມູນແລະແຮງບິດຂອງ shaft ຂາເຂົ້າແມ່ນຂະຫນາດນ້ອຍ, ເສັ້ນຜ່າກາງ shaft; ປາຍຫນຶ່ງຂອງ shaft ຂາເຂົ້າສາມາດຜ່ານຮູ mounting ແລະ embed ເຂົ້າໄປໃນຢູ່ຕາມໂກນ mounting, shaft input ສາມາດ mesh ກັບ gear ໃນ shell mounting ໄດ້, mounting slot ແມ່ນເປີດຢູ່ໃນທ້າຍອື່ນໆຂອງ shaft input, ຫຼັງຈາກນັ້ນ shaft motor ຂອງ reducer motor ໄດ້ຖືກຝັງຢູ່ໃນຊ່ອງ mounting, ແລະແປ້ນແປ້ນແມ່ນ inserted ລະຫວ່າງກະແຈຮາບພຽງແລະ motor ຄົງທີ່ເຊື່ອມຕໍ່ແລະ motor ໄດ້. ເພົາປ້ອນເຂົ້າແມ່ນບັນລຸໄດ້. ໂດຍຜ່ານການຮ່ວມມືທີ່ໄດ້ກ່າວມາຂ້າງເທິງລະຫວ່າງ shaft ຂາເຂົ້າ, ຖານຍຶດ, ສະລັອດຕິງຕິດແລະສະລັອດຕິງກະແຈແປ, ມໍເຕີເກຍສາມາດເຊື່ອມຕໍ່ຢ່າງໄວວາກັບ shaft input ຜ່ານ shaft ມໍເຕີ, ເຊິ່ງອໍານວຍຄວາມສະດວກໃນການຕິດຕັ້ງໄວຂອງມໍເຕີເກຍກັບທີ່ຢູ່ອາໄສ mounting ແລະເຮັດໃຫ້ການໂຫຼດແລະ unloading ຂອງພະນັກງານສະດວກຂຶ້ນ.
3. ພາລະບົດບາດແລະຄວາມແຕກຕ່າງຂອງ shaft ສົ່ງຂອງ reducer.
A. ໂອນພະລັງງານຈໍານວນທີ່ແນ່ນອນ.
B. ການຫມູນວຽນຄວາມໄວຂອງວັດສະດຸປ້ອນ, ຜົນຜະລິດຫມຸນຄວາມໄວຕ່ໍາ, ເພື່ອບັນລຸຈຸດປະສົງຂອງ deceleration. ໃນສະຖານທີ່ຂອງການບໍ່ສົນໃຈຄວາມຕ້ານທານ friction, shaft ຂາເຂົ້າແລະ shaft ຜົນຜະລິດໄດ້ໂອນພະລັງງານເທົ່າທຽມກັນ, ແລະພະລັງງານ = torque * ຄວາມໄວ, ນັ້ນແມ່ນ, ໃນເວລາທີ່ພະລັງງານແມ່ນເທົ່າທຽມກັນ, ແຮງບິດແລະຄວາມໄວ input shaft ຄວາມໄວ, ສະນັ້ນ torque ແມ່ນຂະຫນາດນ້ອຍ, ພຽງແຕ່ເສັ້ນຜ່າກາງ shaft ຂະຫນາດນ້ອຍກວ່າ; ກົງກັນຂ້າມ, ຄວາມໄວ shaft ຜົນຜະລິດແມ່ນຕ່ໍາ, ສະນັ້ນ torque ຂະຫນາດໃຫຍ່, ຕ້ອງໃຊ້ເສັ້ນຜ່າກາງ shaft ຂະຫນາດໃຫຍ່.
V. ແມ່ນຫຍັງຄືເຫດຜົນສໍາລັບການໃຫ້ຄວາມຮ້ອນຂອງ bearings ຂອງມໍເຕີ miniature geared?
ມໍເຕີເຟືອງຈຸນລະພາກໃນການດໍາເນີນງານປົກກະຕິ, ເກິດຈະບໍ່ປາກົດການໃຫ້ຄວາມຮ້ອນຜິດປົກກະຕິ, micro geared motor bearing heating ຮ້າຍແຮງປົກກະຕິແລ້ວມີເຫດຜົນດັ່ງຕໍ່ໄປນີ້.
1. miniature reducer motor bearing ຄວາມເສຍຫາຍຫຼັງຈາກນັ້ນຈະເຮັດໃຫ້ motor bearing overheating.
2. ນໍ້າມັນຫລໍ່ລື່ນທີ່ປະສົມກັບອະນຸພາກທີ່ຜິດປົກກະຕິ ຫຼືສິ່ງແປກປອມຢູ່ໃນລູກປືນຈະເຮັດໃຫ້ລູກປືນສວມໃສ່ເພີ່ມຄວາມຮ້ອນເກີນ.
3. miniature reducer motor bearing oil ການຂາດແຄນ, ຖ້າຫາກວ່າ motor ຢູ່ໃນລັດນີ້ສໍາລັບການໃຊ້ເວລາດົນນານຈະເຮັດໃຫ້ friction ເພີ່ມຂຶ້ນຜົນໃນ overheating bearing.
4. ຄຸນນະພາບຂອງນ້ໍາມັນຫລໍ່ລື່ນແມ່ນບໍ່ດີເກີນໄປ, ຄວາມຫນືດບໍ່ພຽງພໍຫຼືຄວາມຫນືດສູງເກີນໄປ, ການປະຕິບັດການຫລໍ່ລື່ນຈະນໍາໄປສູ່ການໃຫ້ຄວາມຮ້ອນຜິດປົກກະຕິຂອງລູກປືນ.
5. miniature reducer bearing and output shaft, end cover is too loose or too tight, too tight will lead to bearing deformation, too loose will lead to offset will make the bearing heating serious.
6. ການຕິດຕັ້ງລູກປືນທີ່ບໍ່ຖືກຕ້ອງເພື່ອໃຫ້ທັງສອງ shafts ບໍ່ຢູ່ໃນເສັ້ນຊື່ຫຼື bearing imbalance ວົງນອກ, ຫຼັງຈາກນັ້ນ bearing ຈະບໍ່ມີຄວາມຮູ້ສຶກ, ການໂຫຼດແລ່ນ aggravated ແລະຄວາມຮ້ອນ.
VI. ເຫດຜົນພື້ນຖານສໍາລັບການ runout axial ຂອງ motor miniature ແມ່ນຫຍັງ?
1. ກໍລະນີທໍາອິດແມ່ນການເຄື່ອນໄຫວພີ່ນ້ອງຂອງ shaft ແລະ rotor ຂອງມໍເຕີຈຸນລະພາກ, ແກນ rotor ແລະ shaft ກັບຖ້າຫາກວ່າສໍາລັບເຫດຜົນບາງຂຸມ core ແລະ micro motor shaft core clearance ຕໍາແຫນ່ງ, ຊຶ່ງນໍາໄປສູ່ການ rotor ມໍເຕີຈຸນລະພາກຫຼັກແລະ shaft ລະຫວ່າງ axial ແລະ radial ຕໍາແຫນ່ງພີ່ນ້ອງມີການປ່ຽນແປງ, ມີ tampering shaft ເນື່ອງຈາກການເຄື່ອນໄຫວຂອງ axial ເທົ່ານັ້ນ, ປະກົດການ. ມີຄວາມເປັນໄປໄດ້ສູງຈະນໍາໄປສູ່ການ cap end motor miniature ແລະ rotor ສິ້ນ friction deformation, ຫຼື ripple ກັບ stator winding ໄດ້.
2. ກໍລະນີທີສອງແມ່ນ pad ປັບ axial motor micro ເສຍຫາຍຫຼືການຮົ່ວໄຫລ, ພວກເຮົາຢູ່ໃນຂະບວນການອອກແບບແລະການພັດທະນາຂອງມໍເຕີຈຸນລະພາກ, ປັດໃຈການຂະຫຍາຍຄວາມຮ້ອນຂອງວັດສະດຸແມ່ນພິຈາລະນາທີ່ສໍາຄັນ, ດັ່ງນັ້ນໃນແກນຈະປ່ອຍໃຫ້ຊ່ອງຫວ່າງທີ່ແນ່ນອນ, ແຕ່ນີ້ໂດຍກົງຈະນໍາໄປສູ່ axial displacement axial tampering axis, ດັ່ງນັ້ນການນໍາໃຊ້ວິທີການຂອງການໂຫຼດ pad ໄດ້ເພື່ອແກ້ໄຂ, ຖ້າຫາກວ່າການຮົ່ວໄຫລຂອງ pad axial ຄຸນນະພາບຂອງ pad ໄດ້. ຄວາມລົ້ມເຫຼວ, tampering shaft.
3. ກໍລະນີທີ່ສາມແມ່ນ micro motor stator-rotor magnetic centerline automation adjustment resulting in tampering, the ideal state of micro motor is the stator and rotor magnetic centerline overlapping tag, but in the practice the micro motor stator-rotor is more difficult to achieve complete overlap alignment, so the micro motor in the process of operation will be out of this alignment —--set off ສະຖານະການນີ້. ຂະບວນການປັບການຈັດຕັ້ງອັດຕະໂນມັດ, ດັ່ງນັ້ນຂະບວນການການປັບຊ້ໍາຈະປະກົດວ່າ runout axial.
4. ພີ່ນ້ອງກັບຈຸນລະພາກທີ່ມີ propeller ຂອງຕົນເອງໃນການດໍາເນີນງານ, ຂະບວນການລະບາຍອາກາດຈະຜະລິດຜົນບັງຄັບໃຊ້ axial ທີ່ສອດຄ້ອງກັນກ່ຽວກັບມໍເຕີຈຸນລະພາກ, ຖ້າຫາກວ່າຜົນກະທົບການດຸ່ນດ່ຽງຂອງ propeller ບໍ່ດີ, ເຊິ່ງຍັງຈະນໍາໄປສູ່ການເຄື່ອນໄຫວ axial ຂອງ micro-motor.
Micro motor axial runout ຈະຜະລິດຜົນກະທົບ?
ເວົ້າງ່າຍໆ, ຖ້າ motor miniature runout axial ຈະເຮັດໃຫ້ motor miniature ຜິດປົກກະຕິ vibration, ສຽງ, bearing ກະແຈກກະຈາຍ, windings ໄຫມ້, ຫຼຸດຜ່ອນຊີວິດການບໍລິການຂອງສະຖານະການ. ພວກເຮົາສາມາດເພີ່ມ cushion waveform ເພື່ອປັບ cushion ໃນຂອບນອກຂອງລູກປືນມໍເຕີ miniature ແລະເລັບ cap ທ້າຍເພື່ອແກ້ໄຂບັນຫາການເຄື່ອນໄຫວຕາມແກນຂອງມໍເຕີ miniature ໄດ້.
VII. ວິທີການກໍານົດລູກປືນຂອງກ່ອງເກຍຫຼຸດລົງດາວເຄາະ?
ມໍເຕີກໍານົດຄ່າຕົວຫຼຸດລົງຂອງດາວເຄາະໄດ້ຖືກນໍາໃຊ້ໃນຂົງເຂດຕ່າງໆເຊັ່ນ: ເຮືອນອັດສະລິຍະ, ດັ່ງນັ້ນການປັບຕົວຂອງຕົວຫຼຸດລົງຈຸນລະພາກແມ່ນຫຍັງ?
ໂດຍທົ່ວໄປແລ້ວກ່ອງເກຍດາວເຄາະຈຸນລະພາກໃຊ້ເກຍ helical ທີ່ມີຜົນບັງຄັບໃຊ້ຕາມແກນທີ່ແນ່ນອນ, ແລະເຖິງແມ່ນວ່າເກຍເກຍສອງເທົ່າແລະເກຍ spur ຖືກນໍາໃຊ້, ທິດທາງແກນຕ້ອງຖືກຈັດໃສ່. ຂະຫນາດແລະທິດທາງຂອງຜົນບັງຄັບໃຊ້ຕາຫນ່າງຂອງເກຍສາມາດຖືກກໍານົດ, ພຽງແຕ່ span ຂອງ bearing ແລະຈຸດປະຕິບັດຂອງຜົນບັງຄັບໃຊ້ໃນ shaft ໄດ້ຖືກກໍານົດໂດຍການແຕ້ມຮູບ. ດັ່ງນັ້ນ, ການຄັດເລືອກລູກປືນຕໍ່ໄປນີ້ສາມາດເຮັດໄດ້.
1, ຮັບຜິດຊອບທົ່ວໄປແມ່ນລູກປືນ roller spherical, ແຖວດຽວ, ສອງແຖວ bearings tapered roller bearings, double-row cylindrical bearings, ສີ່ຈຸດຕິດຕໍ່ລູກປືນ, ລູກ bearings, ແລະອື່ນໆ.
2, ຂໍ້ມູນຈໍາເພາະຂອງລູກປືນສໍາລັບການເລືອກເບື້ອງຕົ້ນແມ່ນການກໍານົດຂະຫນາດ shaft ເສັ້ນຜ່າກາງ bearing bore, ຄວາມໄວ shaft ຂາເຂົ້າແມ່ນສູງກວ່າ, ຄວນໄດ້ຮັບການຄັດເລືອກດ້ວຍ bore ດຽວກັນໃນຂໍ້ກໍາຫນົດຄວາມອາດສາມາດໂຫຼດຂະຫນາດໃຫຍ່, shaft ກາງມີສອງຄູ່ຂອງ gear meshing ຜົນບັງຄັບໃຊ້ໃນ bearing ໄດ້, ສອດຄ່ອງກັບຂະຫນາດໃຫຍ່, ຄວນເລືອກທີ່ມີ bore ດຽວກັນໃນຂະຫນາດບັນຈຸ;
3, ຄວາມໄວ shaft ຜົນຜະລິດແມ່ນຕ່ໍາແລະມີພຽງແຕ່ຄູ່ຂອງ gear meshing ຜົນບັງຄັບໃຊ້ໃນ shaft ແລະ bearing, ທ່ານສາມາດເລືອກເອົາ bore ດຽວກັນໃນຄວາມສາມາດໃນການໂຫຼດຂອງ bearing ຂະຫນາດກາງຫຼືຂະຫນາດນ້ອຍກວ່າ, ແຕ່ shaft ຜົນຜະລິດແລະ spindle ເຄື່ອງເຊື່ອມຕໍ່ rigid ແລະຜົນກະທົບ, ມັນຄວນຈະເລືອກເອົາ bearing ທີ່ມີຄວາມສາມາດໃນການໂຫຼດຫຼາຍກວ່າເກົ່າ.

VIII. ແມ່ນຫຍັງທີ່ເປັນສາເຫດຂອງ shaft ຫັກຢູ່ໃນເກຍຂອງມໍເຕີເກຍ?
ໃນການເຮັດວຽກປະຈໍາວັນ, ນອກເຫນືອໄປຈາກຜົນຜະລິດຂອງ concentricity ປະກອບ motor reducer ແມ່ນບໍ່ດີ, ແລະຜົນການຫຼຸດຜ່ອນການ shaft ຫັກ, shaft ຜົນຜະລິດຂອງ reducer ຖ້າແຕກ, ບໍ່ມີຫຼາຍກ່ວາເຫດຜົນດັ່ງຕໍ່ໄປນີ້.
ຫນ້າທໍາອິດຂອງການທັງຫມົດ, ປະເພດຂອງການເລືອກທີ່ບໍ່ຖືກຕ້ອງນໍາໄປສູ່ການຫຼຸດຜ່ອນດ້ວຍຜົນບັງຄັບໃຊ້ບໍ່ພຽງພໍ. ຜູ້ໃຊ້ບາງຄົນໃນການຄັດເລືອກ, ເຂົ້າໃຈຜິດວ່າຕາບໃດທີ່ torque ຜົນຜະລິດຈັດອັນດັບຂອງ reducer ທີ່ເລືອກເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງການເຮັດວຽກ, ໃນຄວາມເປັນຈິງ, ມັນບໍ່ແມ່ນ, ເນື່ອງຈາກວ່າ torque ຜົນຜະລິດຈັດອັນດັບຂອງມໍເຕີຄູນດ້ວຍອັດຕາສ່ວນການຫຼຸດຜ່ອນ, ມູນຄ່າຂອງສາຍແອວໃນຫຼັກການຈະຫນ້ອຍກ່ວາ torque ຜົນຜະລິດຈັດອັນດັບຂອງ reducers ທີ່ຄ້າຍຄືກັນສະຫນອງໃຫ້ໂດຍຕົວຢ່າງຜະລິດຕະພັນ.
ອັນທີສອງ, ໃນເວລາດຽວກັນເພື່ອພິຈາລະນາຄວາມອາດສາມາດ overload ຂອງມໍເຕີຂັບຂອງມັນແລະແຮງບິດເຮັດວຽກຕົວຈິງທີ່ຕ້ອງການ. ໂດຍສະເພາະ, ບາງໂອກາດຕ້ອງປະຕິບັດຕາມຄໍາແນະນໍານີ້ຢ່າງເຂັ້ມງວດ, ເຊິ່ງບໍ່ພຽງແຕ່ເປັນການປົກປ້ອງເກຍພາຍໃນຕົວຫຼຸດລົງເທົ່ານັ້ນ, ແຕ່ສ່ວນຫຼາຍແມ່ນທໍ່ຜົນຜະລິດຂອງຕົວຫຼຸດລົງແມ່ນບິດອອກ.
ເວລາປະກາດ: 25-11-2022