ດ້ວຍສຸຂະພາບສາທາລະນະ ແລະຄວາມປອດໄພເປັນບຸລິມະສິດອັນດັບໜຶ່ງໃນຊີວິດປະຈຳວັນຂອງພວກເຮົາ, ການລັອກປະຕູອັດຕະໂນມັດໄດ້ກາຍເປັນທີ່ນິຍົມຫຼາຍຂຶ້ນ, ແລະລັອກເຫຼົ່ານີ້ຕ້ອງມີການຄວບຄຸມການເຄື່ອນໄຫວທີ່ທັນສະໄໝ. ຄວາມແມ່ນຍໍານ້ອຍມໍເຕີ stepperແມ່ນການແກ້ໄຂທີ່ເຫມາະສົມສໍາລັບການອອກແບບທີ່ຫນາແຫນ້ນ, ຊັບຊ້ອນນີ້. ອັດຕະໂນມັດlocks ປະຕູໄດ້ປະມານເວລາໃດຫນຶ່ງ, ໃນເບື້ອງຕົ້ນເລີ່ມຕົ້ນໃນເຂດການຄ້າຂອງໂຮງແຮມແລະຫ້ອງການ. ດ້ວຍການເພີ່ມຂຶ້ນຂອງຈໍານວນຜູ້ໃຊ້ໂທລະສັບສະຫຼາດແລະການແຜ່ກະຈາຍຂອງເຕັກໂນໂລຊີເຮືອນ smart, ທີ່ຢູ່ອາໄສອັດຕະໂນມັດຄໍາຮ້ອງສະຫມັກລັອກປະຕູຍັງໄດ້ຮັບຄວາມນິຍົມ. ມີຄວາມແຕກຕ່າງທາງດ້ານວິຊາການລະຫວ່າງຜູ້ໃຊ້ການຄ້າແລະທີ່ຢູ່ອາໄສ, ເຊັ່ນ: ການໃຊ້ແບດເຕີລີ່ທຽບກັບການເຊື່ອມຕໍ່ເອເລັກໂຕຣນິກແລະ RFID ທຽບກັບເຕັກໂນໂລຢີ Bluetooth.

ສະລັກແບບດັ້ງເດີມຮຽກຮ້ອງໃຫ້ໃສ່ກະແຈເຂົ້າໄປໃນກະບອກລັອກເພື່ອລັອກ / ປົດລັອກມັນໂດຍການຫັນມັນດ້ວຍຕົນເອງ, ປະໂຫຍດຂອງວິທີການນີ້ແມ່ນວ່າມັນຂ້ອນຂ້າງປອດໄພ. ຄົນເຮົາສາມາດໃສ່ກະແຈຜິດ ຫຼືສູນເສຍກະແຈ, ແລະຂະບວນການປ່ຽນກະແຈ/ກະແຈຕ້ອງໃຊ້ເຄື່ອງມື ແລະ ຄວາມຊ່ຽວຊານ. locks ເອເລັກໂຕຣນິກມີຄວາມຍືດຫຍຸ່ນຫຼາຍໃນຄວາມຮູ້ສຶກຂອງການຄວບຄຸມການເຂົ້າເຖິງແລະມັກຈະສາມາດດັດແປງແລະປັບປຸງໄດ້ງ່າຍໂດຍຜ່ານຊອບແວ. locks ເອເລັກໂຕຣນິກຈໍານວນຫຼາຍສະເຫນີໃຫ້ທັງສອງທາງເລືອກການຄວບຄຸມການລັອກຄູ່ມືແລະເອເລັກໂຕຣນິກ, ສະຫນອງການແກ້ໄຂທີ່ເຂັ້ມແຂງຫຼາຍ.
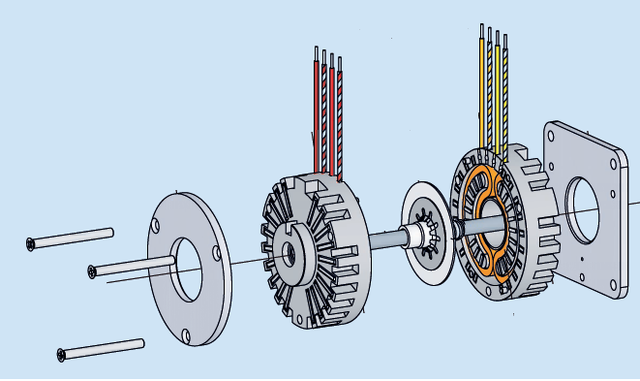
ມໍເຕີ stepper ເສັ້ນຜ່າກາງຂະຫນາດນ້ອຍສໍາລັບ locks ເອເລັກໂຕຣນິກທີ່ຫນາແຫນ້ນແມ່ນເຫມາະສົມສໍາລັບການແກ້ໄຂທີ່ມີຂໍ້ຈໍາກັດຂະຫນາດແລະການຈັດຕໍາແຫນ່ງທີ່ຊັດເຈນ. ວິສະວະກໍາມໍເຕີແລະເຕັກໂນໂລຢີການສະກົດຈິດທີ່ເປັນເຈົ້າຂອງໄດ້ຊຸກຍູ້ການພັດທະນາຂອງມໍເຕີ stepper ທີ່ມີເສັ້ນຜ່າກາງນ້ອຍທີ່ສຸດໃນປະຈຸບັນ (OD 3.4mm). ເຕັກນິກການວິເຄາະແມ່ເຫຼັກແລະໂຄງສ້າງແບບພິເສດແມ່ນຖືກນໍາໃຊ້ເພື່ອເພີ່ມປະສິດທິພາບການອອກແບບແລະວັດສະດຸສໍາລັບພື້ນທີ່ຈໍາກັດທີ່ມີ. ຫນຶ່ງໃນການຕັດສິນໃຈທີ່ສໍາຄັນທີ່ສຸດສໍາລັບມໍເຕີ stepper miniature ແມ່ນຄວາມຍາວຂອງຂັ້ນຕອນຂອງມໍເຕີ, ເຊິ່ງຂຶ້ນກັບຄວາມລະອຽດສະເພາະ. ຄວາມຍາວຂອງຂັ້ນຕອນທົ່ວໄປທີ່ສຸດແມ່ນ 7.5 ອົງສາແລະ 3.6 ອົງສາ, ເຊິ່ງກົງກັບ 48 ແລະ 100 ຂັ້ນຕອນຂອງການປະຕິວັດ, ຕາມລໍາດັບ, stepper motors ມີມຸມຂັ້ນຕອນຂອງ 18 ອົງສາ. ດ້ວຍຂັ້ນຕອນເຕັມ (2-2 ໄລຍະການຕື່ນເຕັ້ນ), motor rotates 20 ຂັ້ນຕອນຕໍ່ການປະຕິວັດແລະ pitch ທົ່ວໄປຂອງ screw ແມ່ນ 0.4 ມມ, ດັ່ງນັ້ນຄວາມຖືກຕ້ອງຂອງການຄວບຄຸມຕໍາແຫນ່ງຂອງ 0.02 ມມສາມາດບັນລຸໄດ້.

ມໍເຕີ stepper ສາມາດມີຕົວຫຼຸດລົງເກຍ, ເຊິ່ງສະຫນອງມຸມຂັ້ນຕອນທີ່ນ້ອຍກວ່າ, ແລະເກຍຫຼຸດລົງທີ່ເພີ່ມແຮງບິດທີ່ມີຢູ່. ສໍາລັບການເຄື່ອນໄຫວເສັ້ນ, ມໍເຕີ stepper ແມ່ນເຊື່ອມຕໍ່ກັບ screw ຜ່ານຫມາກແຫ້ງເປືອກແຂງ (ມໍເຕີເຫຼົ່ານີ້ຍັງເອີ້ນວ່າຕົວກະຕຸ້ນເສັ້ນ). ຖ້າລັອກອີເລັກໂທຣນິກໃຊ້ຕົວຫຼຸດເກຍ, ສະກູສາມາດເຄື່ອນທີ່ດ້ວຍຄວາມແມ່ນຍໍາເຖິງແມ່ນວ່າມີຄວາມຄ້ອຍຂະຫນາດໃຫຍ່.
ພາກສ່ວນການປ້ອນຂໍ້ມູນຂອງການສະຫນອງພະລັງງານ motor stepper ສາມາດປະຕິບັດຮູບແບບຕ່າງໆ, ເຊັ່ນ FPC connectors, terminals ເຊື່ອມຕໍ່ສາມາດໄດ້ຮັບການ welded ໂດຍກົງກັບ PCB, rod ຍູ້ຂອງພາກສ່ວນຜົນຜະລິດສາມາດເປັນ slider ພາດສະຕິກຫຼື slider ໂລຫະ, ແລະລະດັບສະເພາະໃດຫນຶ່ງຂອງ sliders custom ຕາມຄວາມຕ້ອງການການເດີນທາງຂອງ lock ໄດ້. ເນື່ອງຈາກມໍເຕີ stepper ຂະຫນາດນ້ອຍແລະ screws ບາງໆ, ຄວາມຍາວຂອງກະທູ້ທີ່ປຸງແຕ່ງໄດ້ຖືກຈໍາກັດແລະການເດີນທາງສູງສຸດຂອງ lock ໂດຍທົ່ວໄປແມ່ນຫນ້ອຍກວ່າ 50 ມມ. ໂດຍປົກກະຕິແລ້ວ, ມໍເຕີ stepper ມີແຮງດັນປະມານ 150 ຫາ 300 g. ແຮງດັນແມ່ນແຕກຕ່າງກັນໄປຕາມແຮງດັນຂັບ, ຄວາມຕ້ານທານຂອງມໍເຕີ, ແລະອື່ນໆ.
ສະຫຼຸບ
ດ້ວຍຄວາມສົນໃຈຂອງຜູ້ບໍລິໂພກໃນຜະລິດຕະພັນທີ່ມີຂອບຕ່ໍາແລະບໍ່ລົບກວນ, ມໍເຕີ stepper ຂະຫນາດນ້ອຍສາມາດຮອງຮັບຂະຫນາດທີ່ຫົດຕົວນີ້. ນອກເຫນືອໄປຈາກຮູບແບບທີ່ຫນາແຫນ້ນ, ມໍເຕີ stepper ແມ່ນງ່າຍຕໍ່ການຄວບຄຸມ, ໂດຍສະເພາະສໍາລັບການວາງຕໍາແຫນ່ງທີ່ຊັດເຈນແລະຄວາມຕ້ອງການແຮງບິດຄວາມໄວຕ່ໍາເຊັ່ນ: auto-lock. ເພື່ອບັນລຸການທໍາງານດຽວກັນ, ເຕັກໂນໂລຊີມໍເຕີອື່ນໆຮຽກຮ້ອງໃຫ້ມີການເພີ່ມຂອງເຊັນເຊີ Hall-effect ຫຼືກົນໄກການຄວບຄຸມຕໍາແໜ່ງທີ່ສະລັບສັບຊ້ອນ. ມໍເຕີ stepper ສາມາດຂັບເຄື່ອນດ້ວຍ microcontrollers ງ່າຍດາຍ, ເຊິ່ງສາມາດບັນເທົາວິສະວະກອນອອກແບບຂອງຄວາມກັງວົນຂອງການແກ້ໄຂສະລັບສັບຊ້ອນເກີນໄປ.
ເວລາປະກາດ: 25-11-2022