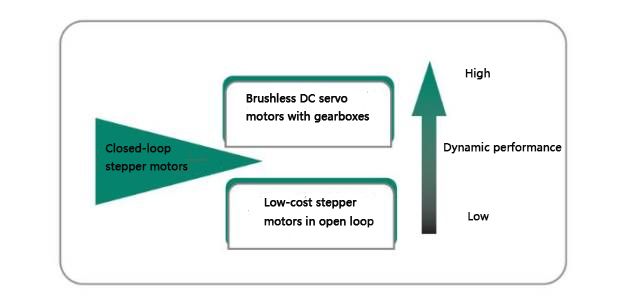
ວົງປິດມໍເຕີ stepperໄດ້ມີການປ່ຽນແປງອັດຕາສ່ວນປະສິດທິພາບຕໍ່ຄ່າໃຊ້ຈ່າຍໃນຫຼາຍຄໍາຮ້ອງສະຫມັກການຄວບຄຸມການເຄື່ອນໄຫວ. ຄວາມສໍາເລັດຂອງມໍເຕີກ້າວຫນ້າວົງປິດ VIC ຍັງໄດ້ເປີດຄວາມເປັນໄປໄດ້ຂອງການປ່ຽນມໍເຕີ servo ທີ່ມີຄ່າໃຊ້ຈ່າຍຕ່ໍາ.ມໍເຕີ stepper.ໃນຈໍານວນການນໍາໃຊ້ອັດຕະໂນມັດອຸດສາຫະກໍາມາດຕະຖານທີ່ເພີ່ມຂຶ້ນ, ຄວາມກ້າວຫນ້າທາງດ້ານເຕັກໂນໂລຢີກໍາລັງປ່ຽນແປງອັດຕາສ່ວນການປະຕິບັດຕໍ່ຄ່າໃຊ້ຈ່າຍລະຫວ່າງມໍເຕີ stepper ແລະມໍເຕີ servo.
Stepper motors ທຽບກັບ servo motors
ອີງຕາມປັນຍາທໍາມະດາ, ລະບົບການຄວບຄຸມ servo ປະຕິບັດໄດ້ດີກວ່າໃນຄໍາຮ້ອງສະຫມັກທີ່ມີຄວາມໄວເກີນ 800 RPM ແລະການຕອບສະຫນອງແບບເຄື່ອນໄຫວສູງ. ມໍເຕີ stepper ແມ່ນເຫມາະສົມສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ມີຄວາມໄວຕ່ໍາ, ຄວາມເລັ່ງຕ່ໍາຫາປານກາງແລະແຮງບິດຖືສູງ.
ດັ່ງນັ້ນສິ່ງທີ່ເປັນພື້ນຖານສໍາລັບສະຕິປັນຍາແບບດັ້ງເດີມນີ້ກ່ຽວກັບມໍເຕີ stepper ແລະມໍເຕີ servo? ໃຫ້ວິເຄາະມັນໃນລາຍລະອຽດເພີ່ມເຕີມຂ້າງລຸ່ມນີ້.
1. ຄວາມງ່າຍດາຍແລະຄ່າໃຊ້ຈ່າຍ
ມໍເຕີ stepper ບໍ່ພຽງແຕ່ລາຄາຖືກກວ່າມໍເຕີ servo, ພວກມັນຍັງງ່າຍກວ່າໃນການເຮັດວຽກແລະການຮັກສາ. ມໍເຕີ stepper ມີຄວາມຫມັ້ນຄົງຢູ່ທີ່ຢຸດແລະຖືຕໍາແຫນ່ງຂອງພວກເຂົາ (ເຖິງແມ່ນວ່າມີການໂຫຼດແບບເຄື່ອນໄຫວ). ຢ່າງໃດກໍຕາມ, ຖ້າການປະຕິບັດທີ່ສູງຂຶ້ນແມ່ນຕ້ອງການສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ແນ່ນອນ, ມໍເຕີ servo ທີ່ມີລາຄາແພງແລະສະລັບສັບຊ້ອນຕ້ອງຖືກນໍາໃຊ້.
2. ໂຄງສ້າງ
ມໍເຕີ stepperrotate ໃນລັກສະນະ stepwise, ການນໍາໃຊ້ coils ແມ່ເຫຼັກເພື່ອຄ່ອຍໆດຶງແມ່ເຫຼັກຈາກຕໍາແຫນ່ງຫນຶ່ງໄປອີກ. ເພື່ອຍ້າຍມໍເຕີ 100 ຕໍາແຫນ່ງໃນທິດທາງໃດກໍ່ຕາມ, ວົງຈອນຮຽກຮ້ອງໃຫ້ມີການດໍາເນີນງານ 100 ຂັ້ນຕອນທີ່ຈະດໍາເນີນການກ່ຽວກັບມໍເຕີ. ມໍເຕີ stepper ໃຊ້ກໍາມະຈອນເພື່ອບັນລຸການເຄື່ອນໄຫວທີ່ເພີ່ມຂຶ້ນ, ເຮັດໃຫ້ຕໍາແຫນ່ງທີ່ຊັດເຈນໂດຍບໍ່ມີການນໍາໃຊ້ເຊັນເຊີຄໍາຄຶດຄໍາເຫັນໃດໆ.
ວິທີການເຄື່ອນທີ່ຂອງ servo motor ແມ່ນແຕກຕ່າງກັນ. ມັນເຊື່ອມຕໍ່ເຊັນເຊີຕໍາແຫນ່ງ - ເຊັ່ນຕົວເຂົ້າລະຫັດ - ກັບ rotor ແມ່ເຫຼັກແລະສືບຕໍ່ກວດພົບຕໍາແຫນ່ງທີ່ແນ່ນອນຂອງມໍເຕີ. servo ຕິດຕາມກວດກາຄວາມແຕກຕ່າງລະຫວ່າງຕໍາແຫນ່ງທີ່ແທ້ຈິງຂອງມໍເຕີແລະຕໍາແຫນ່ງຄໍາສັ່ງແລະປັບປະຈຸບັນຕາມຄວາມເຫມາະສົມ. ລະບົບວົງປິດນີ້ເຮັດໃຫ້ມໍເຕີຢູ່ໃນສະຖານະທີ່ຖືກຕ້ອງຂອງການເຄື່ອນໄຫວ.

3. ຄວາມໄວ ແລະແຮງບິດ
ຄວາມແຕກຕ່າງໃນການປະຕິບັດລະຫວ່າງມໍເຕີ stepper ແລະ servo ແມ່ນມາຈາກການແກ້ໄຂການອອກແບບມໍເຕີທີ່ແຕກຕ່າງກັນ.ມໍເຕີ stepperມີຈໍານວນເສົາທີ່ໃຫຍ່ກວ່າ servomotors, ດັ່ງນັ້ນການປະຕິວັດອັນເຕັມທີ່ຂອງມໍເຕີ stepper ຮຽກຮ້ອງໃຫ້ມີການແລກປ່ຽນກະແສລົມຫຼາຍ, ເຊິ່ງກໍ່ໃຫ້ເກີດການຫຼຸດລົງຢ່າງໄວວາຂອງແຮງບິດໃນຄວາມໄວທີ່ເພີ່ມຂຶ້ນ. ນອກຈາກນັ້ນ, ຖ້າຫາກວ່າແຮງບິດສູງສຸດແມ່ນບັນລຸໄດ້, ມໍເຕີ stepper ອາດຈະສູນເສຍການທໍາງານ synchronization ຄວາມໄວຂອງຕົນ. ສໍາລັບເຫດຜົນເຫຼົ່ານີ້, ມໍເຕີ servo ແມ່ນການແກ້ໄຂທີ່ຕ້ອງການໃນຄໍາຮ້ອງສະຫມັກຄວາມໄວສູງທີ່ສຸດ. ໃນທາງກົງກັນຂ້າມ, ຈໍານວນເສົາທີ່ສູງກວ່າຂອງມໍເຕີ stepper ແມ່ນໄດ້ປຽບໃນຄວາມໄວຕ່ໍາ, ເມື່ອມໍເຕີ stepper ມີປະໂຫຍດແຮງບິດຫຼາຍກວ່າມໍເຕີ servo ທີ່ມີຂະຫນາດດຽວກັນ.
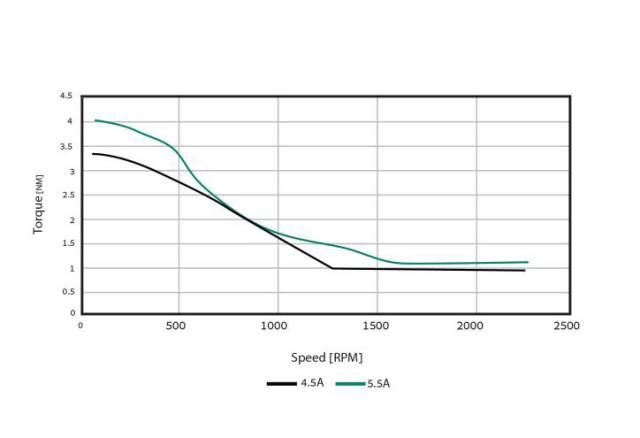
ເມື່ອຄວາມໄວເພີ່ມຂຶ້ນ, ແຮງບິດຂອງມໍເຕີ stepper ຫຼຸດລົງ
4. ການຈັດຕໍາແໜ່ງ
ມີຄວາມແຕກຕ່າງກັນທີ່ສໍາຄັນລະຫວ່າງມໍເຕີ stepper ແລະມໍເຕີ servo ໃນຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງຮູ້ຕໍາແຫນ່ງທີ່ແນ່ນອນຂອງເຄື່ອງຈັກຕະຫຼອດເວລາ. ໃນຄໍາຮ້ອງສະຫມັກການເຄື່ອນໄຫວວົງເປີດທີ່ຄວບຄຸມໂດຍມໍເຕີ stepper, ລະບົບການຄວບຄຸມສົມມຸດວ່າມໍເຕີຢູ່ໃນສະພາບທີ່ຖືກຕ້ອງຂອງການເຄື່ອນໄຫວສະເຫມີ. ຢ່າງໃດກໍ່ຕາມ, ຫຼັງຈາກພົບບັນຫາ, ເຊັ່ນ: ມໍເຕີຢຸດເນື່ອງຈາກອົງປະກອບຕິດ, ຜູ້ຄວບຄຸມບໍ່ສາມາດຮູ້ຕໍາແຫນ່ງຕົວຈິງຂອງເຄື່ອງຈັກ, ເຊິ່ງສາມາດນໍາໄປສູ່ການສູນເສຍຕໍາແຫນ່ງ. ລະບົບວົງປິດຂອງມໍເຕີ servo ຕົວຂອງມັນເອງມີຂໍ້ດີ: ຖ້າມັນຖືກຕິດໂດຍວັດຖຸ, ມັນຈະກວດພົບທັນທີ. ເຄື່ອງຈະຢຸດການເຮັດວຽກ ແລະຈະບໍ່ຢູ່ບ່ອນໃດເລີຍ.
5. ການບໍລິໂພກຄວາມຮ້ອນ ແລະພະລັງງານ
ມໍເຕີ stepper ເປີດຮອບໃຊ້ກະແສຄົງທີ່ແລະໃຫ້ຄວາມຮ້ອນຫຼາຍ. ການຄວບຄຸມວົງປິດພຽງແຕ່ສະຫນອງໃນປະຈຸບັນທີ່ຕ້ອງການສໍາລັບ loop ຄວາມໄວແລະດັ່ງນັ້ນຈຶ່ງຫຼີກເວັ້ນບັນຫາຂອງຄວາມຮ້ອນຂອງມໍເຕີ.
ສະຫຼຸບການປຽບທຽບ
ລະບົບການຄວບຄຸມ Servo ແມ່ນເຫມາະສົມທີ່ສຸດກັບຄໍາຮ້ອງສະຫມັກທີ່ມີຄວາມໄວສູງທີ່ກ່ຽວຂ້ອງກັບການປ່ຽນແປງການໂຫຼດແບບເຄື່ອນໄຫວ, ເຊັ່ນ: ແຂນຫຸ່ນຍົນ. ໃນທາງກົງກັນຂ້າມ, ລະບົບການຄວບຄຸມ Stepper ແມ່ນເຫມາະສົມສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການຄວາມເລັ່ງຕ່ໍາຫາປານກາງແລະແຮງບິດຖືສູງ, ເຊັ່ນເຄື່ອງພິມ 3D, ເຄື່ອງລໍາລຽງ, ແກນຍ່ອຍແລະອື່ນໆ. ເນື່ອງຈາກວ່າມໍເຕີ stepper ມີລາຄາຖືກກວ່າ, ພວກເຂົາສາມາດຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍຂອງລະບົບອັດຕະໂນມັດເມື່ອນໍາໃຊ້. ລະບົບການຄວບຄຸມການເຄື່ອນໄຫວທີ່ຕ້ອງການໃຊ້ປະໂຍດຈາກຄຸນລັກສະນະຂອງມໍເຕີ servo ຈະຕ້ອງພິສູດວ່າມໍເຕີທີ່ມີລາຄາຖືກກວ່ານີ້ມີມູນຄ່ານ້ໍາຫນັກຂອງຄໍາ.
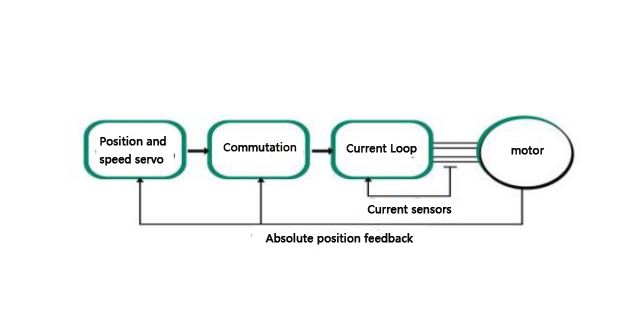
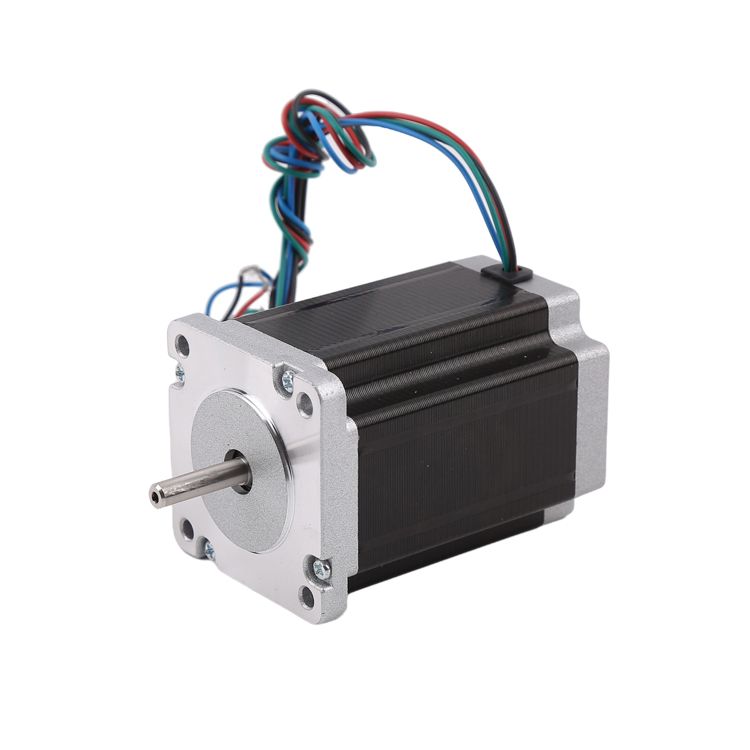
ມໍເຕີ stepper ທີ່ມີການຄວບຄຸມວົງປິດ
ມໍເຕີ stepper ທີ່ມີການຄວບຄຸມເອເລັກໂຕຣນິກປະສົມປະສານແມ່ນທຽບເທົ່າກັບມໍເຕີ DC brushless ສອງເຟດແລະສາມາດປະຕິບັດການຄວບຄຸມຕໍາແຫນ່ງ loop, ການຄວບຄຸມຄວາມໄວຮອບ, ການຄວບຄຸມ DQ, ແລະສູດການຄິດໄລ່ອື່ນໆ. ຕົວເຂົ້າລະຫັດແບບອັດສະລິຍະແບບເປີດຄັ້ງດຽວແມ່ນໃຊ້ສໍາລັບການຫັນປ່ຽນວົງປິດ, ດັ່ງນັ້ນຈຶ່ງຮັບປະກັນແຮງບິດສູງສຸດໃນທຸກຄວາມໄວ.
ການບໍລິໂພກພະລັງງານຕ່ໍາແລະຮັກສາຄວາມເຢັນ
VIC stepper motors ມີປະສິດທິພາບພະລັງງານສູງ. ບໍ່ເຫມືອນກັບມໍເຕີ stepper ເປີດ, ເຊິ່ງສະເຫມີເຮັດວຽກຢູ່ໃນຄໍາສັ່ງໃນປະຈຸບັນຢ່າງເຕັມທີ່ແລະເຮັດໃຫ້ເກີດບັນຫາຄວາມຮ້ອນແລະສິ່ງລົບກວນ, ປະຈຸບັນມີການປ່ຽນແປງຕາມສະພາບຕົວຈິງຂອງການເຄື່ອນໄຫວ, ສໍາລັບການຍົກຕົວຢ່າງໃນລະຫວ່າງການເລັ່ງແລະ deceleration. ຄ້າຍຄືກັບ servos, ປະຈຸບັນທີ່ບໍລິໂພກໂດຍມໍເຕີ stepper ເຫຼົ່ານີ້ຢູ່ໃນເວລາໃດກໍ່ຕາມແມ່ນອັດຕາສ່ວນກັບແຮງບິດຕົວຈິງທີ່ຕ້ອງການ. ເນື່ອງຈາກວ່າມໍເຕີແລະກະດານຄວບຄຸມເອເລັກໂຕຣນິກປະສົມປະສານແລ່ນເຢັນ, ມໍເຕີ VIC stepper ສາມາດບັນລຸແຮງບິດສູງສຸດທີ່ສູງກວ່າທຽບກັບມໍເຕີ servo.
ເຖິງແມ່ນວ່າຢູ່ໃນຄວາມໄວສູງ, ມໍເຕີ stepper VIC ຕ້ອງການກະແສໄຟຟ້າຫນ້ອຍ
ຂັບເຄື່ອນໂດຍຄວາມກ້າວຫນ້າໃນເຕັກໂນໂລຊີວົງປິດ, ມໍເຕີ stepper ສາມາດເຈາະປະສິດທິພາບສູງ, ຄໍາຮ້ອງສະຫມັກຄວາມໄວສູງທີ່ເຄີຍເປັນຂອງ servo motors ກ່ອນຫນ້ານີ້.
ມໍເຕີ stepper ທີ່ມີເທກໂນໂລຍີປິດວົງ
ຈະເປັນແນວໃດຖ້າຂໍ້ດີຂອງເທກໂນໂລຍີ servo ວົງປິດສາມາດນໍາໃຊ້ກັບມໍເຕີ stepper?
ພວກເຮົາສາມາດບັນລຸປະສິດທິພາບປຽບທຽບກັບມໍເຕີ servo ໃນຂະນະທີ່ຍັງຮັບຮູ້ຂໍ້ໄດ້ປຽບຄ່າໃຊ້ຈ່າຍຂອງມໍເຕີ stepper?
ໂດຍການລວມເອົາເທກໂນໂລຍີການຄວບຄຸມວົງປິດ, ມໍເຕີ stepper ຈະກາຍເປັນຜະລິດຕະພັນທີ່ສົມບູນແບບທີ່ມີຄວາມໄດ້ປຽບຂອງທັງມໍເຕີ servo ແລະ stepper ໃນລາຄາຖືກ. ເນື່ອງຈາກວ່າມໍເຕີ stepper ວົງປິດສະຫນອງການປັບປຸງທີ່ສໍາຄັນໃນການປະຕິບັດແລະປະສິດທິພາບພະລັງງານ, ພວກເຂົາສາມາດທົດແທນມໍເຕີ servo ທີ່ມີລາຄາແພງກວ່າໃນຈໍານວນການນໍາໃຊ້ມາດຕະຖານສູງທີ່ເພີ່ມຂຶ້ນ.
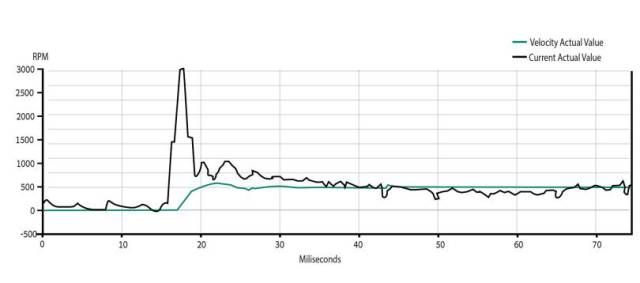
ຕໍ່ໄປນີ້ແມ່ນຕົວຢ່າງຂອງມໍເຕີ stepper ປະສົມປະສານ VIC ທີ່ມີການຄວບຄຸມວົງປິດທີ່ຝັງໄວ້ເພື່ອອະທິບາຍການປະຕິບັດແລະຂໍ້ດີແລະຂໍ້ເສຍຂອງມໍເຕີ stepper ດ້ວຍເທກໂນໂລຍີປິດວົງ.
ກົງກັບຄວາມຕ້ອງການປະສິດທິພາບ
ເພື່ອຮັບປະກັນແຮງບິດພຽງພໍເພື່ອເອົາຊະນະສິ່ງລົບກວນແລະຫຼີກເວັ້ນຂັ້ນຕອນທີ່ສູນເສຍ, ມໍເຕີ stepper ເປີດປົກກະຕິຈໍາເປັນຕ້ອງຮັບປະກັນວ່າແຮງບິດຢ່າງຫນ້ອຍ 40% ສູງກວ່າມູນຄ່າທີ່ຕ້ອງການໂດຍຄໍາຮ້ອງສະຫມັກ. ວົງຈອນປິດ toda stepper motors ບໍ່ມີບັນຫານີ້. ໃນເວລາທີ່ມໍເຕີ stepper ເຫຼົ່ານີ້ຢຸດຍ້ອນການໂຫຼດເກີນ, ພວກເຂົາເຈົ້າຈະສືບຕໍ່ຖືການໂຫຼດໂດຍບໍ່ມີການສູນເສຍແຮງບິດ. ພວກເຂົາເຈົ້າຈະສືບຕໍ່ດໍາເນີນການຫຼັງຈາກສະພາບ overload ໄດ້ຖືກໂຍກຍ້າຍ. ແຮງບິດສູງສຸດສາມາດຮັບປະກັນໃນຄວາມໄວໃດກໍ່ຕາມແລະເຊັນເຊີຕໍາແຫນ່ງຮັບປະກັນວ່າບໍ່ມີການສູນເສຍຂັ້ນຕອນ. ມໍເຕີ stepper ວົງຈອນປິດດັ່ງນັ້ນຈຶ່ງສາມາດຖືກກໍານົດໃຫ້ກົງກັບຄວາມຕ້ອງການແຮງບິດຂອງຄໍາຮ້ອງສະຫມັກທີ່ກ່ຽວຂ້ອງໂດຍບໍ່ຈໍາເປັນຕ້ອງມີຂອບເພີ່ມເຕີມ 40%.
ດ້ວຍມໍເຕີ stepper ເປີດວົງ, ມັນເປັນການຍາກທີ່ຈະຕອບສະຫນອງຄວາມຕ້ອງການແຮງບິດທັນທີທັນໃດສູງເນື່ອງຈາກຄວາມສ່ຽງຂອງຂັ້ນຕອນທີ່ສູນເສຍໄປ. ເມື່ອປຽບທຽບກັບມໍເຕີ stepper ທໍາມະດາ, ມໍເຕີ stepper ວົງປິດ VIC ສາມາດບັນລຸການເລັ່ງໄວຫຼາຍ, ມີສຽງລົບກວນໃນການດໍາເນີນງານຕ່ໍາແລະ resonance ຕ່ໍາ. ພວກເຂົາສາມາດປະຕິບັດງານຢູ່ໃນແບນວິດທີ່ສູງຂຶ້ນຫຼາຍແລະບັນລຸການປະຕິບັດທີ່ດີເລີດ.
ບໍ່ມີຕູ້
Toda ປະສົມປະສານກະດານຄວບຄຸມໄດກັບມໍເຕີ, ຫຼຸດຜ່ອນຈໍານວນສາຍໄຟແລະເຮັດໃຫ້ການແກ້ໄຂການປະຕິບັດງ່າຍດາຍ. ດ້ວຍ toda, ທ່ານສາມາດສ້າງເຄື່ອງຈັກໂດຍບໍ່ມີຕູ້.
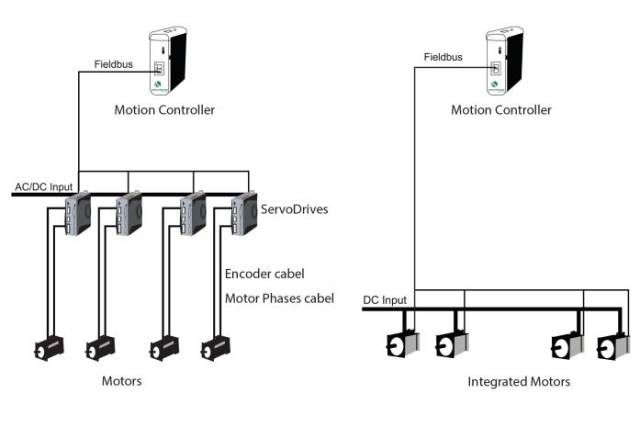
ການປະສົມປະສານຂອງເອເລັກໂຕຣນິກກັບມໍເຕີ stepper ຫຼຸດຜ່ອນຄວາມສັບສົນ
ດ້ວຍເທກໂນໂລຍີປິດວົງ, ມໍເຕີ stepper ວົງຈອນປິດສະເຫນີໃຫ້ຜູ້ໃຊ້ມີຄວາມຖືກຕ້ອງແລະປະສິດທິພາບທີ່ດີເລີດ, ດ້ວຍການປະຕິບັດຂອງມໍເຕີ servo ແລະຄ່າໃຊ້ຈ່າຍຕ່ໍາຂອງມໍເຕີ stepper. ມໍເຕີ stepper ຄ່າໃຊ້ຈ່າຍຕ່ໍາແມ່ນຄ່ອຍໆເຈາະຄໍາຮ້ອງສະຫມັກທີ່ຖ້າບໍ່ດັ່ງນັ້ນຈະຖືກຄອບງໍາໂດຍມໍເຕີ servo ຄ່າໃຊ້ຈ່າຍສູງ.
ເວລາປະກາດ: 10-04-2023