




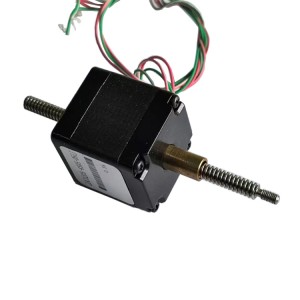
ມໍເຕີສະເຕບເປີໄຮບຣິດເສັ້ນຊື່ NEMA34 86 ມມ ຂັບເຄື່ອນພາຍນອກ ແຮງດັນສູງ
ລາຍລະອຽດ
ມໍເຕີສະເຕບເປີໄຮບຣິດ NEMA 34 ມີຂະໜາດ 86 ມມ.
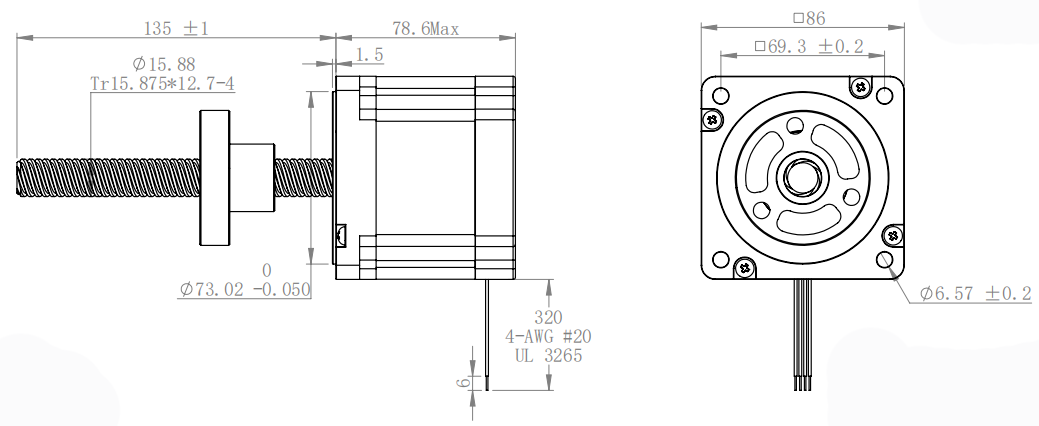
ມັນຍັງເປັນມໍເຕີສະເຕບເປີເສັ້ນຊື່ຂັບເຄື່ອນພາຍນອກທີ່ມີແກນສະກູນຳຄວາມຍາວ 135 ມມ ຢູ່ເທິງ, ພ້ອມທັງມີນັອດ/ສະໄລ້ພາດສະຕິກທີ່ພໍດີກັບມັນ.
ສະກູນຳ ເລກລຸ້ນແມ່ນ: Tr15.875*P3.175*4N
ໄລຍະຫ່າງລະຫວ່າງສະກູນຳແມ່ນ 3.17 ມມ, ແລະ ມັນມີ 4 ຈຸດເລີ່ມຕົ້ນ, ສະນັ້ນ ໄລຍະຫ່າງລະຫວ່າງສາຍນຳ = ຈຳນວນຈຸດເລີ່ມຕົ້ນ * ໄລຍະຫ່າງລະຫວ່າງສະກູນຳ = 4 * 3.175 ມມ = 12.7 ມມ
ດັ່ງນັ້ນຄວາມຍາວຂອງຂັ້ນຕອນຂອງມໍເຕີແມ່ນ: 12.7 ມມ/200 ຂັ້ນຕອນ = 0.0635 ມມ/ຂັ້ນຕອນ
ພວກເຮົາຍັງມີສະກູນຳປະເພດອື່ນໆສຳລັບທາງເລືອກ, ມັນຂຶ້ນກັບຄວາມຕ້ອງການຂອງລູກຄ້າກ່ຽວກັບແຮງດັນຂອງມໍເຕີ ແລະ ຄວາມໄວເສັ້ນຊື່.

ພາລາມິເຕີ
| ເລກຮຸ່ນ | SM86C0905 |
| ເສັ້ນຜ່າສູນກາງມໍເຕີ | 86 ມມ (NEMA34) |
| ແຮງດັນໄຟຟ້າຂອງໄດຣຟ | 5ວີ ດີຊີ |
| ຄວາມຕ້ານທານຂອງຂົດລວດ | 1.6Ω±10%/ໄລຍະ |
| ຈຳນວນເຟສ | 2 ໄລຍະ(ໄບໂພລາ) |
| ມຸມຂອງຂັ້ນໄດ | 1.8°/ຂັ້ນຕອນ |
| ໃຫ້ຄະແນນປັດຈຸບັນ | 3.12A/ເຟສ |
| ແຮງດັນຕໍ່າສຸດ (300PPS) | 50 ກິໂລກຣາມ |
| ຄວາມຍາວຂອງຂັ້ນຕອນ | 0.0635 ມມ/ຂັ້ນ |
ພາລາມິເຕີສະກູນຳ
| ປະເພດສະກູນຳ | ສະກູຮູບສີ່ຫຼ່ຽມມຸມສາກ |
| ສະກູນຳ ເລກລຸ້ນ | Tr15.875*P3.175*4N |
| ເສັ້ນຜ່າສູນກາງພາຍນອກ | 15..875 ມມ |
| ຜູ້ນຳ | 12.7 ມມ |
| ເລີ່ມຕົ້ນ | 4 |
| ສະເໜີ | 3.175 ມມ |
| ຄວາມຍາວຂອງຂັ້ນຕອນ | 0.0635 ມມ/ຂັ້ນ |
ຮູບແຕ້ມການອອກແບບ
ກ່ຽວກັບສະກູນຳ
ສະກູນຳທີ່ໃຊ້ໃນມໍເຕີສະເຕບເປີໄຮບຣິດແບບເສັ້ນຊື່ໂດຍທົ່ວໄປແມ່ນສະກູນຳຮູບຊົງສີ່ຫຼ່ຽມ.
ຕົວຢ່າງສຳລັບສະກູນຳ Tr3.5*P0.3*1N.
Tr ໝາຍເຖິງປະເພດສະກູນຳຮູບສີ່ຫຼ່ຽມມຸມສາກ
P0.3 ໝາຍຄວາມວ່າ pitch ຂອງສະກູນຳແມ່ນ 0.3 ມມ
1N ໝາຍເຖິງສະກູນຳເລີ່ມຕົ້ນດ່ຽວ.
ສາຍນຳສະກູ = ຈຳນວນຈຸດເລີ່ມຕົ້ນ * ຄວາມສູງ
ສະນັ້ນສຳລັບສະກູນຳສະເພາະນີ້, ມັນແມ່ນນຳ 0.3 ມມ.
ມຸມສະເຕບເປີຂອງມໍເຕີຂອງມໍເຕີສະເຕບເປີແບບປະສົມແມ່ນ 1.8 ອົງສາ/ກ້າວ, ເຊິ່ງໃຊ້ເວລາ 200 ກ້າວເພື່ອໝຸນໜຶ່ງຮອບ.
ຄວາມຍາວຂອງຂັ້ນຕອນແມ່ນການເຄື່ອນໄຫວເສັ້ນຊື່ທີ່ມໍເຕີເຮັດ, ເມື່ອມັນໃຊ້ເວລາພຽງບາດກ້າວດຽວ.
ສຳລັບສະກູນຳ 0.3 ມມ, ຄວາມຍາວຂອງຂັ້ນໄດແມ່ນ 0.3 ມມ/200 ຂັ້ນ = 0.0015 ມມ/ຂັ້ນໄດ
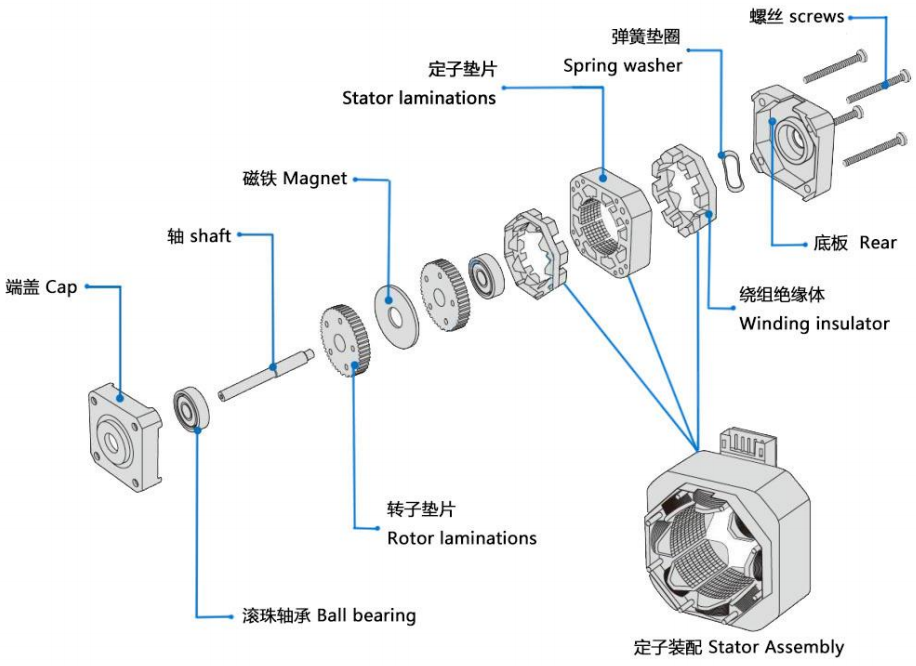
ໂຄງສ້າງພື້ນຖານຂອງມໍເຕີ stepper NEMA
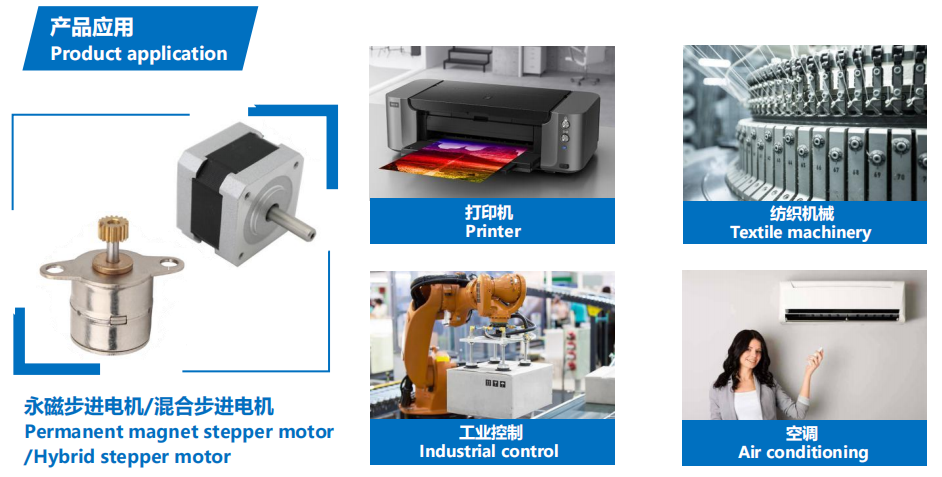
ການນໍາໃຊ້ມໍເຕີ stepper ແບບປະສົມ
ເນື່ອງຈາກຄວາມລະອຽດສູງຂອງມໍເຕີສະເຕບເປີໄຮບຣິດ (200 ຫຼື 400 ກ້າວຕໍ່ຮອບ), ພວກມັນຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການຄວາມແມ່ນຍໍາສູງ, ເຊັ່ນ:
ການພິມ 3D
ການຄວບຄຸມອຸດສາຫະກໍາ (CNC, ເຄື່ອງ milling ອັດຕະໂນມັດ, ເຄື່ອງຈັກແຜ່ນແພ)
ອຸປະກອນຄອມພິວເຕີ
ເຄື່ອງຫຸ້ມຫໍ່
ແລະລະບົບອັດຕະໂນມັດອື່ນໆທີ່ຕ້ອງການການຄວບຄຸມຄວາມແມ່ນຍໍາສູງ.
ລູກຄ້າຄວນປະຕິບັດຕາມຫຼັກການຂອງ "ການເລືອກມໍເຕີສະເຕບເປີກ່ອນ, ຈາກນັ້ນເລືອກໄດຣເວີໂດຍອີງໃສ່ມໍເຕີສະເຕບເປີທີ່ມີຢູ່ແລ້ວ"
ມັນດີທີ່ສຸດທີ່ຈະບໍ່ໃຊ້ໂໝດຂັບຂີ່ແບບເຕັມຂັ້ນຕອນເພື່ອຂັບເຄື່ອນມໍເຕີສະປີດໄຮບຣິດ, ແລະການສັ່ນສະເທືອນຈະໃຫຍ່ກວ່າພາຍໃຕ້ການຂັບຂີ່ແບບເຕັມຂັ້ນຕອນ.
ມໍເຕີສະເຕບເປີໄຮບຣິດແມ່ນເໝາະສົມກວ່າສຳລັບໂອກາດທີ່ມີຄວາມໄວຕ່ຳ. ພວກເຮົາແນະນຳວ່າຄວາມໄວບໍ່ເກີນ 1000 rpm (6666PPS ທີ່ 0.9 ອົງສາ), ດີກວ່າລະຫວ່າງ 1000-3000PPS (0.9 ອົງສາ), ແລະມັນສາມາດຕິດກັບກ່ອງເກຍເພື່ອຫຼຸດຄວາມໄວຂອງມັນ. ມໍເຕີມີປະສິດທິພາບໃນການເຮັດວຽກສູງ ແລະ ມີສຽງດັງຕ່ຳທີ່ຄວາມຖີ່ທີ່ເໝາະສົມ.
ເນື່ອງຈາກເຫດຜົນທາງປະຫວັດສາດ, ມີພຽງແຕ່ມໍເຕີທີ່ມີແຮງດັນ 12V ເທົ່ານັ້ນທີ່ໃຊ້ 12V. ແຮງດັນໄຟຟ້າອື່ນໆທີ່ຢູ່ໃນຮູບແຕ້ມອອກແບບບໍ່ແມ່ນແຮງດັນໄຟຟ້າທີ່ເໝາະສົມທີ່ສຸດສຳລັບມໍເຕີ. ລູກຄ້າຄວນເລືອກແຮງດັນໄຟຟ້າທີ່ເໝາະສົມ ແລະ ຕົວຂັບທີ່ເໝາະສົມໂດຍອີງໃສ່ຄວາມຕ້ອງການຂອງຕົນເອງ.
ເມື່ອໃຊ້ມໍເຕີດ້ວຍຄວາມໄວສູງ ຫຼື ການໂຫຼດຫຼາຍ, ໂດຍທົ່ວໄປແລ້ວມັນຈະບໍ່ເລີ່ມຕົ້ນທີ່ຄວາມໄວໃນການເຮັດວຽກໂດຍກົງ. ພວກເຮົາແນະນຳໃຫ້ເພີ່ມຄວາມຖີ່ ແລະ ຄວາມໄວເທື່ອລະກ້າວ. ດ້ວຍສອງເຫດຜົນຄື: ໜຶ່ງ, ມໍເຕີບໍ່ສູນເສຍຂັ້ນຕອນ, ແລະ ສອງ, ມັນສາມາດຫຼຸດຜ່ອນສຽງລົບກວນ ແລະ ປັບປຸງຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງ.
ມໍເຕີບໍ່ຄວນເຮັດວຽກຢູ່ໃນພື້ນທີ່ສັ່ນສະເທືອນ (ຕໍ່າກວ່າ 600 PPS). ຖ້າຕ້ອງໃຊ້ມັນໃນຄວາມໄວຕ່ຳ, ບັນຫາການສັ່ນສະເທືອນສາມາດຫຼຸດລົງໄດ້ໂດຍການປ່ຽນແປງແຮງດັນ, ກະແສໄຟຟ້າ ຫຼື ການເພີ່ມການຫຼຸດຄວາມດັນ.
ເມື່ອມໍເຕີເຮັດວຽກຕໍ່າກວ່າ 600PPS (0.9 ອົງສາ), ມັນຄວນຈະຖືກຂັບເຄື່ອນດ້ວຍກະແສໄຟຟ້າຂະໜາດນ້ອຍ, ຕົວໜ่วงໄຟຟ້າຂະໜາດໃຫຍ່ ແລະ ແຮງດັນໄຟຟ້າຕ່ຳ.
ສຳລັບການໂຫຼດທີ່ມີຄວາມเฉื่อยຫຼາຍ, ຄວນເລືອກມໍເຕີຂະໜາດໃຫຍ່.
ເມື່ອຕ້ອງການຄວາມແມ່ນຍໍາສູງຂຶ້ນ, ມັນສາມາດແກ້ໄຂໄດ້ໂດຍການເພີ່ມກ່ອງເກຍ, ເພີ່ມຄວາມໄວຂອງມໍເຕີ, ຫຼື ໃຊ້ການຂັບເຄື່ອນແບບແບ່ງສ່ວນ. ນອກຈາກນີ້, ມໍເຕີ 5 ເຟສ (ມໍເຕີ unipolar) ສາມາດໃຊ້ໄດ້, ແຕ່ລາຄາຂອງລະບົບທັງໝົດແມ່ນຂ້ອນຂ້າງແພງ, ສະນັ້ນມັນຈຶ່ງບໍ່ຄ່ອຍໄດ້ໃຊ້.
ຂະໜາດມໍເຕີສະເຕບເປີ:
ປະຈຸບັນພວກເຮົາມີມໍເຕີສະເຕບເປີໄຮບຣິດຂະໜາດ 20 ມມ (NEMA8), 28 ມມ (NEMA11), 35 ມມ (NEMA14), 42 ມມ (NEMA17), 57 ມມ (NEMA23), 86 ມມ (NEMA34). ພວກເຮົາແນະນຳໃຫ້ກຳນົດຂະໜາດມໍເຕີກ່ອນ, ຈາກນັ້ນຢືນຢັນພາລາມິເຕີອື່ນໆ, ເມື່ອທ່ານເລືອກມໍເຕີສະເຕບເປີໄຮບຣິດ.
ບໍລິການປັບແຕ່ງ
ການອອກແບບມໍເຕີສາມາດປັບໄດ້ຕາມຄວາມຕ້ອງການຂອງລູກຄ້າລວມທັງ:
ເສັ້ນຜ່າສູນກາງຂອງມໍເຕີ: ພວກເຮົາມີມໍເຕີເສັ້ນຜ່າສູນກາງ 6 ມມ, 8 ມມ, 10 ມມ, 15 ມມ ແລະ 20 ມມ
ຄວາມຕ້ານທານຂອງຂົດລວດ/ແຮງດັນໄຟຟ້າທີ່ກຳນົດໄວ້: ຄວາມຕ້ານທານຂອງຂົດລວດສາມາດປັບໄດ້, ແລະ ດ້ວຍຄວາມຕ້ານທານທີ່ສູງຂຶ້ນ, ແຮງດັນໄຟຟ້າທີ່ກຳນົດໄວ້ຂອງມໍເຕີຈະສູງຂຶ້ນ.
ການອອກແບບວົງເລັບ/ຄວາມຍາວຂອງສະກູນຳ: ຖ້າລູກຄ້າຕ້ອງການໃຫ້ວົງເລັບຍາວ/ສັ້ນ, ດ້ວຍການອອກແບບພິເສດເຊັ່ນ: ຮູຕິດຕັ້ງ, ມັນສາມາດປັບໄດ້.
PCB + ສາຍ + ຕົວເຊື່ອມຕໍ່: ການອອກແບບຂອງ PCB, ຄວາມຍາວຂອງສາຍ ແລະ ຄວາມສູງຂອງຕົວເຊື່ອມຕໍ່ສາມາດປັບໄດ້ທັງໝົດ, ພວກມັນສາມາດປ່ຽນເປັນ FPC ໄດ້ຖ້າລູກຄ້າຕ້ອງການ.
ເວລານຳ
ຖ້າພວກເຮົາມີຕົວຢ່າງຢູ່ໃນສະຕັອກ, ພວກເຮົາສາມາດສົ່ງອອກຕົວຢ່າງພາຍໃນ 3 ມື້.
ຖ້າພວກເຮົາບໍ່ມີຕົວຢ່າງຢູ່ໃນສະຕັອກ, ພວກເຮົາຈໍາເປັນຕ້ອງຜະລິດພວກມັນ, ເວລາຜະລິດແມ່ນປະມານ 20 ວັນຕາມປະຕິທິນ.
ສຳລັບການຜະລິດເປັນຈຳນວນຫຼາຍ, ເວລານຳແມ່ນຂຶ້ນກັບປະລິມານການສັ່ງຊື້.
ວິທີການຊໍາລະ ແລະ ເງື່ອນໄຂການຊໍາລະ
ສຳລັບຕົວຢ່າງ, ໂດຍທົ່ວໄປພວກເຮົາຍອມຮັບ Paypal ຫຼື alibaba.
ສຳລັບການຜະລິດຈຳນວນຫຼາຍ, ພວກເຮົາຍອມຮັບການຈ່າຍເງິນ T/T.
ສຳລັບຕົວຢ່າງ, ພວກເຮົາເກັບເງິນເຕັມກ່ອນການຜະລິດ.
ສຳລັບການຜະລິດຈຳນວນຫຼາຍ, ພວກເຮົາສາມາດຮັບເງິນລ່ວງໜ້າ 50% ກ່ອນການຜະລິດ, ແລະ ເກັບເງິນທີ່ເຫຼືອ 50% ກ່ອນການຂົນສົ່ງ.
ຫຼັງຈາກທີ່ພວກເຮົາຮ່ວມມືສັ່ງຊື້ຫຼາຍກວ່າ 6 ເທື່ອ, ພວກເຮົາສາມາດເຈລະຈາເງື່ອນໄຂການຈ່າຍເງິນອື່ນໆເຊັ່ນ A/S (ຫຼັງຈາກເຫັນ)
ຄຳຖາມທີ່ຖືກຖາມເລື້ອຍໆ
1. ເວລາສົ່ງຕົວຢ່າງໂດຍທົ່ວໄປແມ່ນດົນປານໃດ? ເວລາສົ່ງສິນຄ້າດົນປານໃດສຳລັບການສັ່ງຊື້ຂະໜາດໃຫຍ່?
ເວລານຳສຳລັບການສັ່ງຊື້ຕົວຢ່າງແມ່ນປະມານ 15 ມື້, ເວລານຳສຳລັບການສັ່ງຊື້ປະລິມານຫຼາຍແມ່ນ 25-30 ມື້.
2. ທ່ານຍອມຮັບການບໍລິການທີ່ກໍາຫນົດເອງບໍ?
ພວກເຮົາຍອມຮັບຜະລິດຕະພັນທີ່ປັບແຕ່ງໄດ້. ລວມທັງພາລາມິເຕີມໍເຕີ, ປະເພດສາຍໄຟ, ເພົາອອກ ແລະອື່ນໆ.
3. ມັນເປັນໄປໄດ້ບໍທີ່ຈະເພີ່ມຕົວເຂົ້າລະຫັດໃສ່ມໍເຕີນີ້ໄດ້?
ສຳລັບມໍເຕີປະເພດນີ້, ພວກເຮົາສາມາດເພີ່ມຕົວເຂົ້າລະຫັດໃສ່ຝາປິດມໍເຕີໄດ້.
ຄຳຖາມທີ່ຖືກຖາມເລື້ອຍໆ
1. ຄວາມແຕກຕ່າງລະຫວ່າງການເຊື່ອມຕໍ່ສາຍໄຟ bipolar ແລະ unipolar ຂອງມໍເຕີ stepper ແມ່ນຫຍັງ?
ມໍເຕີສະເຕບເປີທີ່ມີການເຊື່ອມຕໍ່ໄບໂພລາໃຊ້ວິທີການຂັບເຄື່ອນທີ່ກະແສໄຟຟ້າໄຫຼໄປໃນທັງສອງທິດທາງໃນຂົດລວດດຽວ (ຂັບເຄື່ອນໄບໂພລາ).
ມໍເຕີສະເຕບເປີທີ່ມີການເຊື່ອມຕໍ່ແບບຂົ້ວດຽວມີກ໊ອກນ້ຳຢູ່ໃຈກາງ ແລະ ໃຊ້ວິທີການຂັບເຄື່ອນທີ່ກະແສໄຟຟ້າໄຫຼໄປໃນທິດທາງຄົງທີ່ສະເໝີໃນຂົດລວດດຽວ (ຂັບເຄື່ອນແບບຂົ້ວດຽວ).
2. ມໍເຕີ Stepper ໃນຮູບແບບການດໍາເນີນງານເລີ່ມຕົ້ນ-ຢຸດບໍ່ສາມາດເລີ່ມຕົ້ນເຫດຜົນແລະວິທີການປະມວນຜົນໄດ້
ກ. ນ້ຳໜັກເກີນ: ການເລືອກມໍເຕີຜິດພາດ, ເລືອກຂະໜາດຂອງມໍເຕີທີ່ໃຫຍ່ກວ່າ.
ຂ. ຄວາມຖີ່ສູງເກີນໄປ: ຫຼຸດຄວາມຖີ່ລົງ
ຄ. ຖ້າມໍເຕີສັ່ນໄປມາ, ຫຼື ແຮງບິດມີຂະໜາດນ້ອຍຫຼາຍ, ຊີ້ບອກວ່າມີຄວາມເສຍຫາຍຂອງເຟສ, ຫຼື ວົງຈອນແຕກ: ປ່ຽນ ຫຼື ສ້ອມແປງມໍເຕີ
ງ. ກະແສໄຟຟ້າເຟສບໍ່ພຽງພໍ: ເພີ່ມກະແສໄຟຟ້າເຟສ, ຢ່າງໜ້ອຍກໍ່ສຳລັບສອງສາມຂັ້ນຕອນທຳອິດຂອງການເລີ່ມຕົ້ນ
3. ສາເຫດ ແລະ ວິທີແກ້ໄຂສຳລັບມໍເຕີສະເຕບເປີທີ່ເລັ່ງຄວາມໄວສຳເລັດແຕ່ຢຸດໝຸນເມື່ອພວກມັນບັນລຸຄວາມໄວທີ່ໝັ້ນຄົງ.
ສາເຫດ: ມໍເຕີສະເຕບເປີກຳລັງເຮັດວຽກຕາມຂີດຈຳກັດຄວາມຈຸຂອງມັນ ແລະ ຢຸດເຮັດວຽກຍ້ອນການເລັ່ງຄວາມໄວຫຼາຍເກີນໄປ. ໂຣເຕີສັ່ນ ແລະ ເຮັດວຽກບໍ່ສະຖຽນ.
ວິທີແກ້ໄຂ.
①ຫຼຸດການເລັ່ງ, ເຊັ່ນ: ເລືອກການເລັ່ງທີ່ຕ່ຳກວ່າ ຫຼື ໃຊ້ລະດັບການເລັ່ງສອງລະດັບທີ່ແຕກຕ່າງກັນ, ສູງກວ່າໃນຕອນເລີ່ມຕົ້ນ ແລະ ຕ່ຳກວ່າໃກ້ກັບຄວາມໄວສູງສຸດ.
②ເພີ່ມແຮງບິດ
③ເພີ່ມຕົວສັ່ນກົນຈັກໃສ່ເພົາດ້ານຫຼັງ, ແຕ່ສິ່ງນີ້ຈະເພີ່ມຄວາມเฉื่อยຂອງໂຣເຕີ
④ຂັບລົດຜ່ານເຂດຍ່ອຍ
ສົ່ງຂໍ້ຄວາມຂອງທ່ານຫາພວກເຮົາ:
ໝວດໝູ່ຜະລິດຕະພັນ
-
ມໍເຕີ stepper ປະສົມ NEMA11 28mm ເສັ້ນຊື່ທີ່ບໍ່ມີຝາປິດ...
-

ມໍເຕີສະເຕບໄຮບຣິດ NEMA11 ຂະໜາດ 28 ມມ 1.8 ອົງສາ...
-

ຄວາມແມ່ນຍໍາສູງ 42mm stepper motor NEMA 17 hybri ...
-
ມໍເຕີສະເຕບເປີໄຮບຣິດເສັ້ນຊື່ NEMA8 ຂະໜາດ 20 ມມ ພ້ອມລະບົບແລ່ນ...
-

ມໍເຕີສະເຕບເປີເກຍດາວເຄາະ 35 ມມ (NEMA 14) ...
-

ແຮງບິດສູງ NEMA 23 ມໍເຕີ stepper ປະສົມ 57mm m ...