.jpg)
.jpg)
.jpg)
.jpg)
ມໍເຕີສະເຕບເປີໄຮບຣິດ Nema 23 (57 ມມ), ໄບໂພລາ, 4 ສາຍ, ສະກູນຳ ACME, ສຽງດັງຕ່ຳ, ອາຍຸການໃຊ້ງານຍາວນານ, ປະສິດທິພາບສູງ.
ມໍເຕີສະເຕບເປີໄຮບຣິດ Nema 23 (57 ມມ), ໄບໂພລາ, 4 ສາຍ, ສະກູນຳ ACME, ສຽງດັງຕ່ຳ, ອາຍຸການໃຊ້ງານຍາວນານ, ປະສິດທິພາບສູງ.
ມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ ນີ້ມີສາມປະເພດຄື: ຂັບຜ່ານພາຍນອກ, ຜ່ານແກນ, ແລະ ຜ່ານແກນຄົງທີ່. ທ່ານສາມາດເລືອກໄດ້ຕາມຄວາມຕ້ອງການສະເພາະຂອງທ່ານ.
ມໍເຕີນີ້ມີຂະໜາດ 20 ມມ, 28 ມມ, 35 ມມ, 42 ມມ, 57 ມມ, 86 ມມ.
ຄວາມຍາວຂອງຂັ້ນຕອນ, 0.001524 ມມ ~ 0.127 ມມ
ປະສິດທິພາບ ແຮງດັນສູງສຸດເຖິງ 240 ກິໂລກຣາມ, ອຸນຫະພູມເພີ່ມຂຶ້ນຕໍ່າ, ການສັ່ນສະເທືອນຕໍ່າ, ສຽງດັງຕໍ່າ, ອາຍຸການໃຊ້ງານຍາວນານ (ສູງສຸດ 5 ລ້ານຮອບວຽນ), ຄວາມແມ່ນຍໍາຂອງຕໍາແໜ່ງສູງ (ສູງສຸດ ±0.01 ມມ)
ຄຳອະທິບາຍ
| ຊື່ຜະລິດຕະພັນ | ມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ |
| ຮຸ່ນ | VSM57HSM |
| ປະເພດ | ມໍເຕີສະເຕບເປີໄຮບຣິດ |
| ມຸມຂັ້ນໄດ | 1.8° |
| ແຮງດັນ (V) | 2.3 / 3 / 3.1 / 3.8 |
| ກະແສໄຟຟ້າ (A) | 3/4 |
| ຄວາມຕ້ານທານ (ໂອມ) | 0.75 / 1 / 0.78 / 0.95 |
| ຄວາມດຸ່ນດ່ຽງ (mH) | 2.5 / 4.5 / 3.3 / 4.5 |
| ສາຍຕະກົ່ວ | 4 |
| ຄວາມຍາວຂອງມໍເຕີ (ມມ) | 45 / 55 / 65 / 75 |
| ອຸນຫະພູມອາກາດລ້ອມຮອບ | -20℃ ~ +50℃ |
| ອຸນຫະພູມເພີ່ມຂຶ້ນ | ສູງສຸດ 80K |
| ຄວາມແຮງຂອງໄດອີເລັກຕຣິກ | 1mA ສູງສຸດ @ 500V, 1KHz, 1Sec. |
| ຄວາມຕ້ານທານການສນວນ | 100MΩ ຕໍ່າສຸດ @500Vdc |
ໃບຢັ້ງຢືນ

ພາລາມິເຕີໄຟຟ້າ:
| ຂະໜາດມໍເຕີ | ແຮງດັນ /ໄລຍະ (ວ) | ປັດຈຸບັນ /ໄລຍະ (ກ) | ຄວາມຕ້ານທານ /ໄລຍະ (ໂອເມຕ໌) | ຄວາມດຸ່ນດ່ຽງ /ໄລຍະ (ໄມໂຄຣແມັດ) | ຈຳນວນຂອງ ສາຍຕະກົ່ວ | ຄວາມเฉื่อยຂອງໂຣເຕີ (ກຣາມ.ຊມ2) | ນ້ຳໜັກມໍເຕີ (ກ) | ຄວາມຍາວຂອງມໍເຕີ L (ມມ) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
ລາຍລະອຽດຂອງສະກູນຳ ແລະ ພາລາມິເຕີປະສິດທິພາບ
| ເສັ້ນຜ່າສູນກາງ (ມມ) | ຜູ້ນຳ (ມມ) | ຂັ້ນຕອນ (ມມ) | ກຳລັງປິດລະບົບລັອກດ້ວຍຕົນເອງ (ນ) |
| 9.525 | 1.27 | 0.00635 | 800 |
| 9.525 | 2.54 | 0.0127 | 300 |
| 9.525 | 5.08 | 0.0254 | 90 |
| 9.525 | 10.16 | 0.0508 | 30 |
| 9.525 | 25.4 | 0.127 | 6 |
ໝາຍເຫດ: ສຳລັບລາຍລະອຽດເພີ່ມເຕີມຂອງສະກູນຳ, ກະລຸນາຕິດຕໍ່ພວກເຮົາ.
ແຜນວາດໂຄງຮ່າງມໍເຕີພາຍນອກມາດຕະຖານ VSM57HSM:
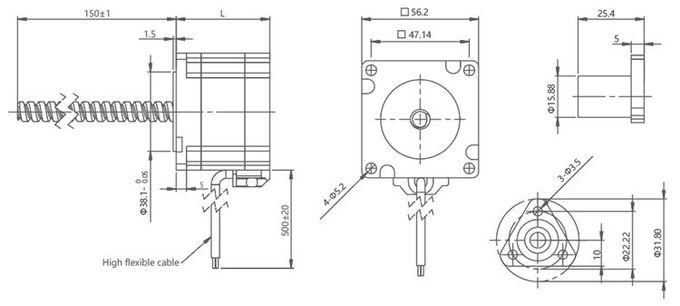
ໝາຍເຫດ:
ຄວາມຍາວຂອງສະກູສາມາດປັບແຕ່ງໄດ້
ການເຄື່ອງຈັກທີ່ກຳນົດເອງແມ່ນໃຊ້ໄດ້ຢູ່ປາຍຂອງສະກູນຳ
ແຜນວາດໂຄງຮ່າງມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ ແບບມາດຕະຖານ:
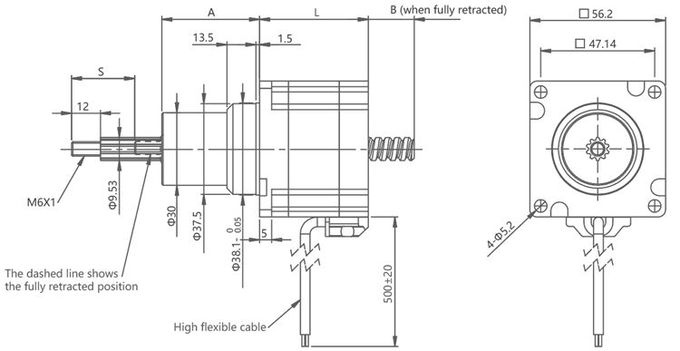
ໝາຍເຫດ:
ການເຄື່ອງຈັກທີ່ກຳນົດເອງແມ່ນໃຊ້ໄດ້ຢູ່ປາຍຂອງສະກູນຳ
| ເສັ້ນເລືອດຕັນໃນ S (ມມ) | ມິຕິ A (ມມ) | ມິຕິ B (ມມ) | |||
| ລ = 45 | ລ = 55 | ລ = 65 | ລ = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30.5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36.8 | 13.8 | 4.8 | 0 | 0 |
| 31.8 | 43.2 | 20.2 | 11.2 | 0.2 | 0 |
| 38.1 | 49.5 | 26.5 | 17.5 | 6.5 | 0 |
| 50.8 | 62.2 | 39.2 | 30.2 | 19.2 | 9.1 |
| 63.5 | 74.9 | 51.9 | 42.9 | 31.9 | 21.9 |
ຮູບແຕ້ມໂຄງຮ່າງມໍເຕີມາດຕະຖານຜ່ານຄົງທີ່ແບບໄຮບຣິດສະເຕບເປີມໍເຕີ 57 ມມ
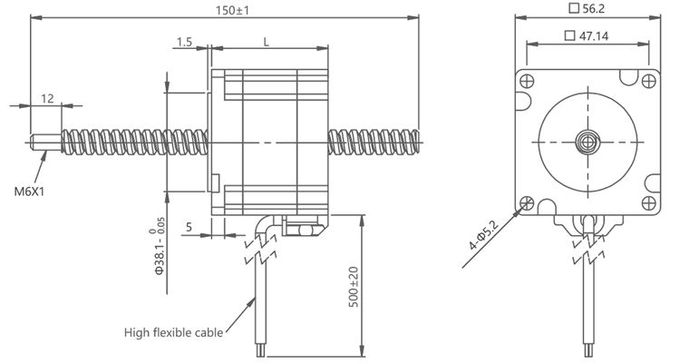
ໝາຍເຫດ:
ຄວາມຍາວຂອງສະກູສາມາດປັບແຕ່ງໄດ້
ການເຄື່ອງຈັກທີ່ກຳນົດເອງແມ່ນໃຊ້ໄດ້ຢູ່ປາຍຂອງສະກູນຳ
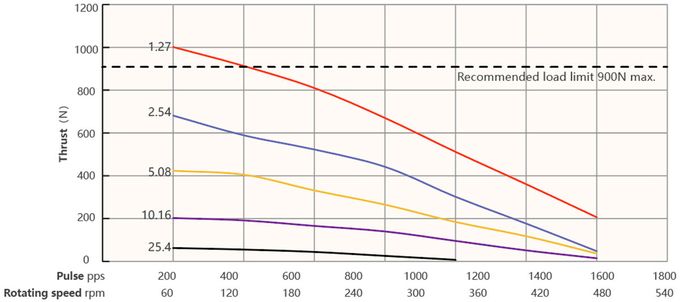
ຄວາມໄວ ແລະ ເສັ້ນໂຄ້ງແຮງດຶງ:
ມໍເຕີຊຸດ 57 ຄວາມຍາວ 45 ມມ ລະບົບຂັບເຄື່ອນແບບ Bipolar Chopper
ຄວາມຖີ່ຂອງກຳມະຈອນກະແສໄຟຟ້າ 100% ແລະ ເສັ້ນໂຄ້ງແຮງດັນ (ສະກູນຳ Φ9.525 ມມ)
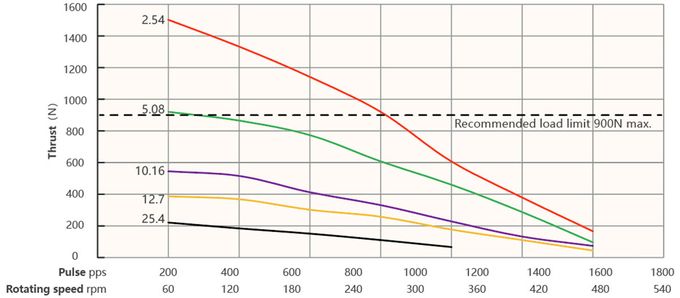
ມໍເຕີຊຸດ 57 ຄວາມຍາວ 55 ມມ ລະບົບຂັບເຄື່ອນແບບ Bipolar Chopper
ຄວາມຖີ່ຂອງກຳມະຈອນກະແສໄຟຟ້າ 100% ແລະ ເສັ້ນໂຄ້ງແຮງດັນ (ສະກູນຳ Φ9.525 ມມ)
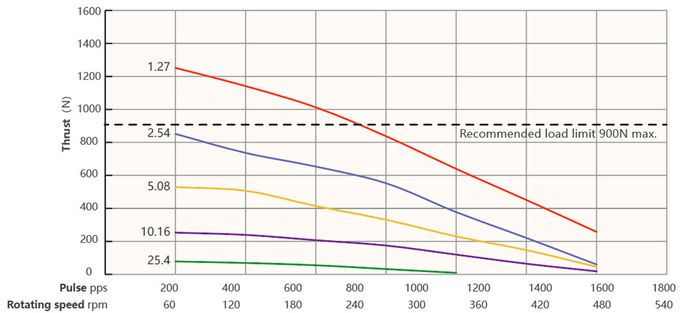
| ຕະກົ່ວ (ມມ) | ຄວາມໄວເສັ້ນຊື່ (ມມ/ວິນາທີ) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
ເງື່ອນໄຂການທົດສອບ:
ລະບົບຂັບເຄື່ອນແບບ Chopper, ບໍ່ມີການ ramping, ເຄິ່ງ micro-stepping, ແຮງດັນໄຟຟ້າຂອງລະບົບຂັບເຄື່ອນ 40V
ມໍເຕີຊຸດ 57 ຄວາມຍາວ 65 ມມ ລະບົບຂັບເຄື່ອນແບບ Bipolar Chopper
ຄວາມຖີ່ຂອງກຳມະຈອນກະແສໄຟຟ້າ 100% ແລະ ເສັ້ນໂຄ້ງແຮງດັນ (ສະກູນຳ Φ9.525 ມມ)
ມໍເຕີຊຸດ 57 ຄວາມຍາວ 75 ມມ ລະບົບຂັບເຄື່ອນແບບ Bipolar Chopper
ຄວາມຖີ່ຂອງກຳມະຈອນກະແສໄຟຟ້າ 100% ແລະ ເສັ້ນໂຄ້ງແຮງດັນ (ສະກູນຳ Φ9.525 ມມ)
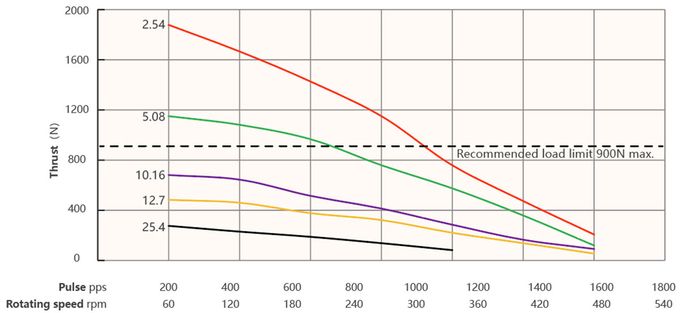
| ຕະກົ່ວ (ມມ) | ຄວາມໄວເສັ້ນຊື່ (ມມ/ວິນາທີ) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
ເງື່ອນໄຂການທົດສອບ:
ລະບົບຂັບເຄື່ອນແບບ Chopper, ບໍ່ມີການ ramping, ເຄິ່ງ micro-stepping, ແຮງດັນໄຟຟ້າຂອງລະບົບຂັບເຄື່ອນ 40V
ຂົງເຂດການນຳໃຊ້
ການພິມ 3D:ມໍເຕີສະເຕບເປີປະສົມ 57 ມມ ຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນເຄື່ອງພິມ 3D ເພື່ອຄວບຄຸມຕຳແໜ່ງ ແລະ ການເຄື່ອນໄຫວຂອງຫົວພິມ.
ເຄື່ອງມືເຄື່ອງຈັກ CNC:ໃນເຄື່ອງຈັກຄວບຄຸມດ້ວຍຕົວເລກຄອມພິວເຕີ (CNC), ມໍເຕີສະເຕບເປີປະສົມ 57 ມມ ຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມການເຄື່ອນໄຫວຂອງເຄື່ອງມືຕັດສໍາລັບການດໍາເນີນງານເຄື່ອງຈັກທີ່ມີຄວາມແມ່ນຍໍາສູງ.
ອຸປະກອນອັດຕະໂນມັດ:ມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ ສາມາດໃຊ້ໄດ້ໃນອຸປະກອນອັດຕະໂນມັດທີ່ຫຼາກຫຼາຍ, ເຊັ່ນ: ເຄື່ອງຈັກຫຸ້ມຫໍ່ອັດຕະໂນມັດ, ລະບົບຄັດແຍກອັດຕະໂນມັດ, ສາຍການປະກອບອັດຕະໂນມັດ, ແລະອື່ນໆ, ສຳລັບການຄວບຄຸມການເຄື່ອນໄຫວ ແລະ ຕຳແໜ່ງ.
ເຄື່ອງຈັກສິ່ງທໍ:ໃນອຸດສາຫະກຳສິ່ງທໍ, ມໍເຕີສະເຕບເປີປະສົມ 57 ມມ ສາມາດໃຊ້ເພື່ອຄວບຄຸມເຄື່ອງຈັກປັ່ນ, ຜ້າທໍ ແລະ ອຸປະກອນອື່ນໆເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງ ແລະ ຄວາມໝັ້ນຄົງຂອງຂະບວນການສິ່ງທໍ.
ອຸປະກອນການແພດ:ມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ ຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນອຸປະກອນການແພດເຊັ່ນ: ປໍ້າສັກຢາທາງການແພດ, ຫຸ່ນຍົນທາງການແພດ, ອຸປະກອນສະແກນຮູບພາບ, ແລະອື່ນໆ ສຳລັບການຄວບຄຸມຕຳແໜ່ງ ແລະ ການຄວບຄຸມການເຄື່ອນໄຫວທີ່ຊັດເຈນ.
ຫຸ່ນຍົນ:ມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ ຖືກນຳໃຊ້ໃນການນຳໃຊ້ຫຸ່ນຍົນຫຼາກຫຼາຍຊະນິດ, ລວມທັງຫຸ່ນຍົນອຸດສາຫະກຳ, ຫຸ່ນຍົນບໍລິການ, ຫຸ່ນຍົນຮ່ວມມື, ແລະອື່ນໆ, ສຳລັບການເຄື່ອນໄຫວ ແລະ ການໝູນໃຊ້ທີ່ຊັດເຈນ.
ລະບົບສາງສິນຄ້າອັດຕະໂນມັດ:ໃນລະບົບສາງ ແລະ ການຂົນສົ່ງອັດຕະໂນມັດ, ມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ ສາມາດໃຊ້ເພື່ອຄວບຄຸມສາຍພານລຳລຽງ, ລິຟ, ເຄນຍົກສິນຄ້າ ແລະ ອຸປະກອນອື່ນໆເພື່ອໃຫ້ໄດ້ຕຳແໜ່ງ ແລະ ການຈັດການສິນຄ້າທີ່ຖືກຕ້ອງ.
ເຫຼົ່ານີ້ແມ່ນພຽງແຕ່ບາງສ່ວນຂອງການນຳໃຊ້ທົ່ວໄປຂອງມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ, ແລະໃນຄວາມເປັນຈິງ, ພວກມັນຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນຫຼາຍໆຂົງເຂດອື່ນໆ, ລວມທັງອຸປະກອນການພິມ, ລະບົບຄວາມປອດໄພ, ເຄື່ອງມືຄວາມແມ່ນຍຳ, ແລະອື່ນໆ.
ຂໍ້ໄດ້ປຽບ
ອັດຕາສ່ວນແຮງບິດຕໍ່ຂະໜາດສູງ:ເຖິງວ່າຈະມີຂະໜາດກະທັດຮັດ, ມໍເຕີສະເຕບເປີໄຮບຣິດ 57 ມມ ສາມາດສົ່ງແຮງບິດໄດ້ສູງ. ສິ່ງນີ້ເຮັດໃຫ້ພວກມັນເໝາະສົມກັບການນຳໃຊ້ທີ່ມີພື້ນທີ່ຈຳກັດ, ແຕ່ຕ້ອງການແຮງບິດສູງ.
ການຄວບຄຸມແບບວົງວຽນເປີດ:ມໍເຕີສະເຕບເປີໄຮບຣິດສາມາດເຮັດວຽກໃນລະບົບຄວບຄຸມແບບວົງເປີດ, ຊຶ່ງໝາຍຄວາມວ່າພວກມັນບໍ່ຕ້ອງການອຸປະກອນຕອບສະໜອງຕຳແໜ່ງເຊັ່ນ: ຕົວເຂົ້າລະຫັດ. ສິ່ງນີ້ເຮັດໃຫ້ລະບົບຄວບຄຸມງ່າຍຂຶ້ນ ແລະ ຫຼຸດຜ່ອນຕົ້ນທຶນໂດຍລວມ.
ຕຳແໜ່ງທີ່ຊັດເຈນ:ມໍເຕີສະເຕບເປີໄຮບຣິດໃຫ້ຄວາມສາມາດໃນການວາງຕຳແໜ່ງທີ່ຊັດເຈນເນື່ອງຈາກຄວາມລະອຽດຂອງຂັ້ນຕອນທີ່ມີຢູ່ໃນຕົວມັນເອງ. ພວກມັນສາມາດເຄື່ອນທີ່ໃນລະດັບນ້ອຍໆ, ເຊິ່ງຊ່ວຍໃຫ້ສາມາດວາງຕຳແໜ່ງໄດ້ຢ່າງຖືກຕ້ອງ ແລະ ເຮັດຊ້ຳໄດ້.
ການດໍາເນີນງານທີ່ລຽບງ່າຍ:ມໍເຕີສະເຕບເປີແບບປະສົມສາມາດບັນລຸການເຮັດວຽກທີ່ລຽບງ່າຍ, ໂດຍສະເພາະເມື່ອຂັບເຄື່ອນດ້ວຍເຕັກນິກການສະເຕບຂະໜາດນ້ອຍ. ການສະເຕບຂະໜາດນ້ອຍແບ່ງແຕ່ລະຂັ້ນຕອນອອກເປັນຂັ້ນຕອນຍ່ອຍຂະໜາດນ້ອຍກວ່າ, ເຊິ່ງເຮັດໃຫ້ການເຄື່ອນໄຫວລຽບງ່າຍ ແລະ ຫຼຸດຜ່ອນການສັ່ນສະເທືອນ.
ເວລາຕອບສະໜອງໄວ:ມໍເຕີສະເຕບເປີໄຮບຣິດມີເວລາຕອບສະໜອງໄວ, ເຮັດໃຫ້ສາມາດເລັ່ງ ແລະ ຫຼຸດຄວາມໄວໄດ້ໄວ. ຄຸນສົມບັດນີ້ມີປະໂຫຍດສຳລັບການນຳໃຊ້ທີ່ຕ້ອງການການເຄື່ອນໄຫວແບບເຄື່ອນໄຫວ ແລະ ວ່ອງໄວ.
ຄວາມໜ້າເຊື່ອຖື ແລະ ຄວາມທົນທານສູງ:ມໍເຕີສະເຕບເປີໄຮບຣິດເປັນທີ່ຮູ້ຈັກໃນດ້ານຄວາມທົນທານ ແລະ ຄວາມໜ້າເຊື່ອຖື. ພວກມັນມີອາຍຸການໃຊ້ງານທີ່ຍາວນານ, ຄວາມຕ້ອງການການບຳລຸງຮັກສາຕໍ່າ, ແລະ ສາມາດທົນທານຕໍ່ສະພາບການເຮັດວຽກທີ່ຮຸນແຮງ.
ວິທີແກ້ໄຂທີ່ມີປະສິດທິພາບດ້ານຕົ້ນທຶນ:ເມື່ອປຽບທຽບກັບເຕັກໂນໂລຊີການຄວບຄຸມການເຄື່ອນໄຫວອື່ນໆ ເຊັ່ນ: ມໍເຕີເຊີໂວ, ມໍເຕີສະເຕບເປີແບບປະສົມໂດຍທົ່ວໄປແລ້ວສະເໜີວິທີແກ້ໄຂທີ່ມີປະສິດທິພາບດ້ານຕົ້ນທຶນຫຼາຍກວ່າ. ພວກມັນໃຫ້ຄວາມສົມດຸນທີ່ດີລະຫວ່າງປະສິດທິພາບ ແລະ ລາຄາທີ່ເໝາະສົມ.
ການເຊື່ອມໂຍງງ່າຍໆ:ມໍເຕີສະເຕບເປີໄຮບຣິດມີຢູ່ຢ່າງກວ້າງຂວາງ ແລະ ເຂົ້າກັນໄດ້ກັບອຸປະກອນເອເລັກໂຕຣນິກຂັບເຄື່ອນ ແລະ ລະບົບຄວບຄຸມຕ່າງໆ. ພວກມັນສາມາດປະສົມປະສານເຂົ້າກັບເຄື່ອງຈັກ ແລະ ການຕັ້ງຄ່າອັດຕະໂນມັດປະເພດຕ່າງໆໄດ້ຢ່າງງ່າຍດາຍ.
ປະສິດທິພາບດ້ານພະລັງງານ:ມໍເຕີສະເຕບເປີໄຮບຣິດໃຊ້ພະລັງງານພຽງແຕ່ເມື່ອພວກມັນເຄື່ອນທີ່ເທົ່ານັ້ນ, ເຊິ່ງເຮັດໃຫ້ມັນປະຫຍັດພະລັງງານ. ເມື່ອພວກມັນຢຸດນິ້ງ, ພວກມັນບໍ່ຕ້ອງການພະລັງງານຢ່າງຕໍ່ເນື່ອງ, ເຊິ່ງປະກອບສ່ວນເຂົ້າໃນການປະຫຍັດພະລັງງານໂດຍລວມ.
ຂໍ້ກຳນົດໃນການເລືອກມໍເຕີ:
►ທິດທາງການເຄື່ອນໄຫວ/ການຕິດຕັ້ງ
►ຄວາມຕ້ອງການການໂຫຼດ
► ຂໍ້ກຳນົດກ່ຽວກັບພະຍາດເສັ້ນເລືອດໃນສະໝອງຕີບ
► ຄວາມຕ້ອງການດ້ານເຄື່ອງຈັກ
►ຄວາມຕ້ອງການຄວາມແມ່ນຍໍາ
►ຄວາມຕ້ອງການຄຳຕິຊົມຂອງຕົວເຂົ້າລະຫັດ
► ຂໍ້ກຳນົດການປັບດ້ວຍຕົນເອງ
► ຂໍ້ກຳນົດດ້ານສິ່ງແວດລ້ອມ
ກອງປະຊຸມຜະລິດ


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)