





ມໍເຕີສະກູບານປະສົມ Nema 23 (57 ມມ) ສາຍໄຟ 4 ເສັ້ນ ມຸມຂັ້ນ 1.8° ສຳລັບອຸປະກອນການວິນິດໄສທາງການແພດ
ມໍເຕີສະກູບານປະສົມ Nema 23 (57 ມມ) ສາຍໄຟ 4 ເສັ້ນ ມຸມຂັ້ນ 1.8° ສຳລັບອຸປະກອນການວິນິດໄສທາງການແພດ
ມໍເຕີສະເຕບເປີໄຮບຣິດ Nema 23 (57 ມມ), ໄບໂພລາ, 4 ສາຍ, ສະກູບານ, ສຽງດັງຕ່ຳ, ອາຍຸການໃຊ້ງານຍາວນານ, ປະສິດທິພາບສູງ, ໄດ້ຮັບການຮັບຮອງຈາກ CE ແລະ RoHS.
ຄວາມສາມາດໃນການໂຫຼດຂະໜາດໃຫຍ່, ການສັ່ນສະເທືອນຂະໜາດນ້ອຍ, ສຽງດັງຕ່ຳ, ຄວາມໄວໄວ, ການຕອບສະໜອງໄວ, ການເຮັດວຽກລຽບງ່າຍ, ອາຍຸການໃຊ້ງານຍາວນານ, ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງສູງ (ສູງເຖິງ ±0.005 ມມ)
ລາຍລະອຽດ
| ຊື່ຜະລິດຕະພັນ | ມໍເຕີສະກູບານປະສົມ 57 ມມ |
| ຮຸ່ນ | VSM57BSHSM |
| ປະເພດ | ມໍເຕີສະເຕບເປີໄຮບຣິດ |
| ມຸມຂັ້ນໄດ | 1.8° |
| ແຮງດັນ (V) | 2.3 / 3 / 3.1 / 3.8 |
| ກະແສໄຟຟ້າ (A) | 3 / 4 |
| ຄວາມຕ້ານທານ (ໂອມ) | 0.75 / 1 / 0.78 / 0.95 |
| ຄວາມດຸ່ນດ່ຽງ (mH) | 2.5 / 4.5 / 3.3 / 4.5 |
| ສາຍຕະກົ່ວ | 4 |
| ຄວາມຍາວຂອງມໍເຕີ (ມມ) | 45 / 55 / 65 / 75 |
| ອຸນຫະພູມອາກາດລ້ອມຮອບ | -20℃ ~ +50℃ |
| ອຸນຫະພູມເພີ່ມຂຶ້ນ | ສູງສຸດ 80K |
| ຄວາມແຮງຂອງໄດອີເລັກຕຣິກ | 1mA ສູງສຸດ @ 500V, 1KHz, 1Sec. |
| ຄວາມຕ້ານທານການສນວນ | 100MΩ ຕໍ່າສຸດ @500Vdc |
ໃບຢັ້ງຢືນ

ພາລາມິເຕີໄຟຟ້າ:
| ຂະໜາດມໍເຕີ | ແຮງດັນ /ໄລຍະ (ວ) | ປັດຈຸບັນ /ໄລຍະ (ກ) | ຄວາມຕ້ານທານ /ໄລຍະ (ໂອເມຕ໌) | ຄວາມດຸ່ນດ່ຽງ /ໄລຍະ (ໄມໂຄຣແມັດ) | ຈຳນວນຂອງ ສາຍຕະກົ່ວ | ຄວາມเฉื่อยຂອງໂຣເຕີ (ກຣາມ.ຊມ2) | ນ້ຳໜັກມໍເຕີ (ກ) | ຄວາມຍາວຂອງມໍເຕີ L (ມມ) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
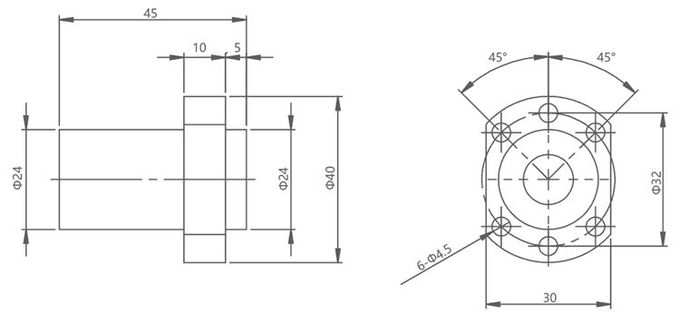
ແຜນວາດໂຄງຮ່າງມໍເຕີພາຍນອກມາດຕະຖານ VSM57BSHSM:
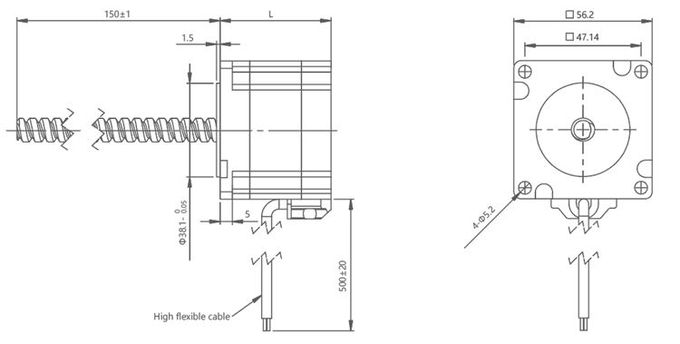
ໝາຍເຫດ:
ຄວາມຍາວຂອງສະກູສາມາດປັບແຕ່ງໄດ້
ການເຄື່ອງຈັກທີ່ກຳນົດເອງແມ່ນໃຊ້ໄດ້ຢູ່ປາຍຂອງສະກູນຳ
ກະລຸນາຕິດຕໍ່ພວກເຮົາສຳລັບລາຍລະອຽດເພີ່ມເຕີມຂອງສະກູບານ.
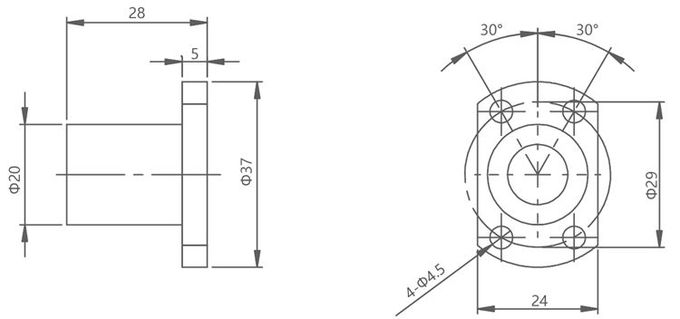
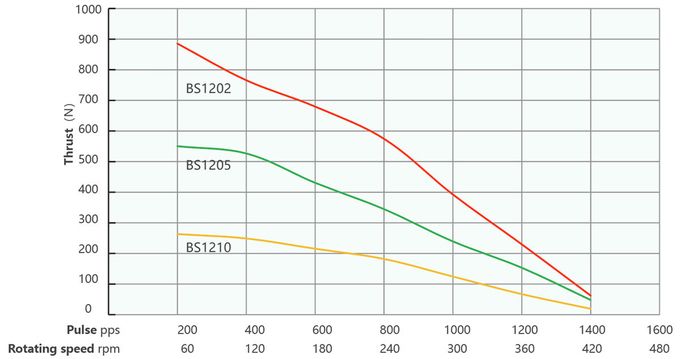
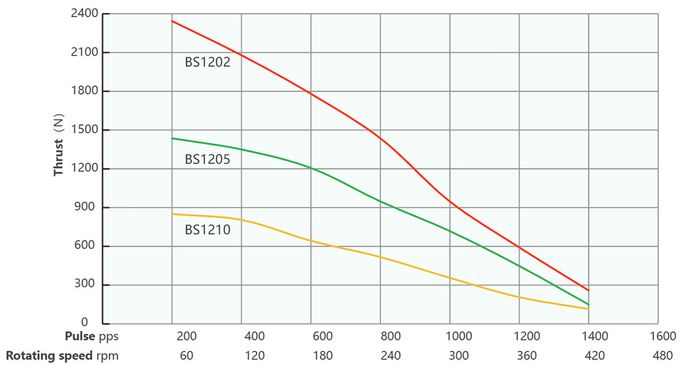
ຮູບແຕ້ມໂຄງຮ່າງຂອງນັອດບານ VSM57BSHSM 1202:
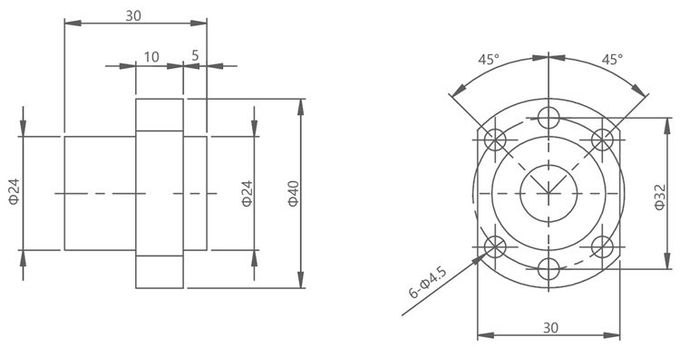
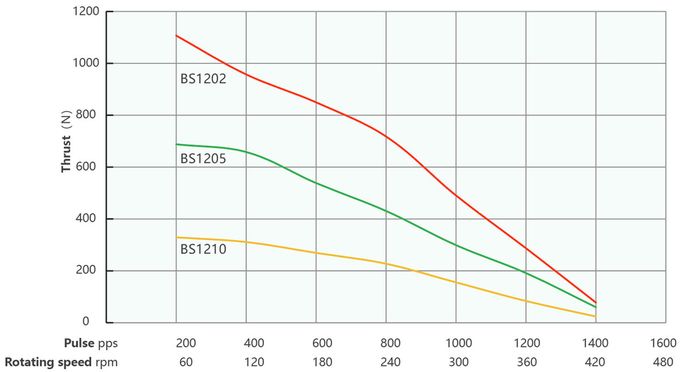
ຮູບແຕ້ມໂຄງຮ່າງຂອງນັອດບານ VSM57BSHSM 1205:
ຮູບແຕ້ມໂຄງຮ່າງຂອງນັອດບານ VSM57BSHSM 1210:
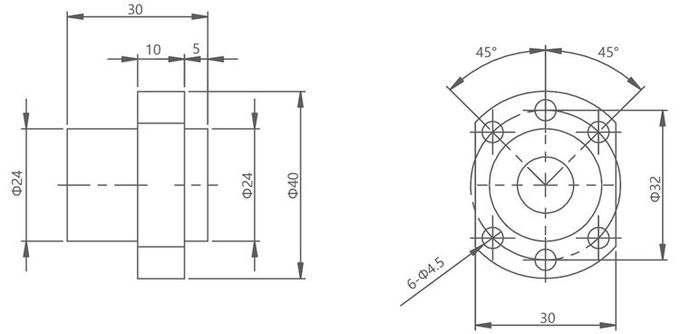
ຮູບແຕ້ມໂຄງຮ່າງຂອງນັອດບານ VSM57BSHSM 1210:
ຄວາມໄວ ແລະ ເສັ້ນໂຄ້ງແຮງດຶງ
ມໍເຕີຊຸດ 57 ຄວາມຍາວ 45 ມມ ລະບົບຂັບເຄື່ອນແບບ Bipolar Chopper
ຄວາມຖີ່ຂອງກຳມະຈອນກະແສໄຟຟ້າ 100% ແລະ ເສັ້ນໂຄ້ງແຮງດັນ
ມໍເຕີຊຸດ 57 ຄວາມຍາວ 55 ມມ ລະບົບຂັບເຄື່ອນແບບ Bipolar Chopper
ຄວາມຖີ່ຂອງກຳມະຈອນກະແສໄຟຟ້າ 100% ແລະ ເສັ້ນໂຄ້ງແຮງດັນ
| ຕະກົ່ວ (ມມ) | ຄວາມໄວເສັ້ນຊື່ (ມມ/ວິນາທີ) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
ເງື່ອນໄຂການທົດສອບ:ລະບົບຂັບເຄື່ອນແບບ Chopper, ບໍ່ມີການ ramping, ເຄິ່ງ micro-stepping, ແຮງດັນໄຟຟ້າຂອງລະບົບຂັບເຄື່ອນ 40V
ມໍເຕີຊຸດ 57 ຄວາມຍາວ 65 ມມ ລະບົບຂັບເຄື່ອນແບບ Bipolar Chopper
ຄວາມຖີ່ຂອງກຳມະຈອນກະແສໄຟຟ້າ 100% ແລະ ເສັ້ນໂຄ້ງແຮງດັນ
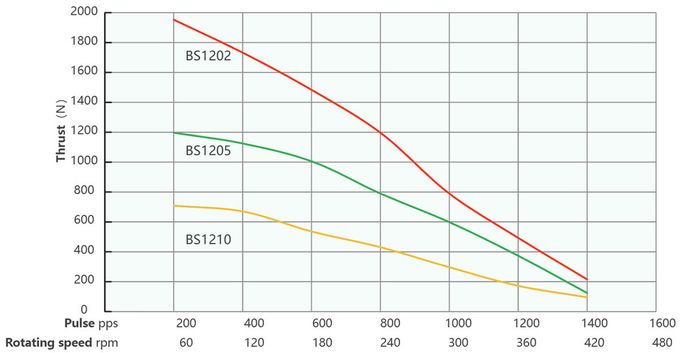
ມໍເຕີຊຸດ 57 ຄວາມຍາວ 75 ມມ ລະບົບຂັບເຄື່ອນແບບ Bipolar Chopper
ຄວາມຖີ່ຂອງກຳມະຈອນກະແສໄຟຟ້າ 100% ແລະ ເສັ້ນໂຄ້ງແຮງດັນ
| ຕະກົ່ວ (ມມ) | ຄວາມໄວເສັ້ນຊື່ (ມມ/ວິນາທີ) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
ເງື່ອນໄຂການທົດສອບ:ລະບົບຂັບເຄື່ອນແບບ Chopper, ບໍ່ມີການ ramping, ເຄິ່ງ micro-stepping, ແຮງດັນໄຟຟ້າຂອງລະບົບຂັບເຄື່ອນ 40V
ຂົງເຂດການນໍາໃຊ້:
ອຸປະກອນການວິນິດໄສທາງການແພດ:ມໍເຕີສະກູບານປະສົມຂະໜາດ 57 ມມ ສາມາດໃຊ້ໃນອຸປະກອນການວິນິດໄສທາງການແພດເຊັ່ນ: ເຄື່ອງສະແກນຮູບພາບ, ເຄື່ອງສະແກນ CT, ອຸປະກອນ X-ray, ເຄື່ອງມື MRI ແລະອື່ນໆ. ການຄວບຄຸມຕຳແໜ່ງ ແລະ ຄວາມໝັ້ນຄົງທີ່ມີຄວາມແມ່ນຍຳສູງຂອງພວກມັນຊ່ວຍໃຫ້ສາມາດເຄື່ອນໄຫວ ແລະ ຕຳແໜ່ງໄດ້ຢ່າງແນ່ນອນໃນລະຫວ່າງການຮັບ ແລະ ປະມວນຜົນຮູບພາບທາງການແພດ.
ເຄື່ອງມືວິທະຍາສາດຊີວິດ:ໃນການຄົ້ນຄວ້າ ແລະ ການທົດລອງວິທະຍາສາດຊີວິດ, ມໍເຕີສະກູບານປະສົມຂະໜາດ 57 ມມ ຖືກນໍາໃຊ້ໃນລະບົບການຈັດການຂອງແຫຼວອັດຕະໂນມັດ, ອຸປະກອນກວດສອບຜົນຜະລິດສູງ, ອຸປະກອນເພາະເລี้ยงຈຸລັງ, ເຄື່ອງລໍາດັບພັນທຸກໍາ, ແລະອື່ນໆ. ຄວາມແມ່ນຍໍາສູງ ແລະ ຄວາມໜ້າເຊື່ອຖືຂອງມໍເຕີເຫຼົ່ານີ້ຊ່ວຍໃຫ້ພວກມັນສາມາດຕອບສະໜອງຄວາມຕ້ອງການສໍາລັບການເຄື່ອນໄຫວ ແລະ ການຄວບຄຸມຕໍາແຫນ່ງທີ່ຊັດເຈນໃນອຸປະກອນການທົດລອງ.
ຫຸ່ນຍົນ:ມໍເຕີສະເຕບເປີບານສະກູປະສົມ 57 ມມ ຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນຫຸ່ນຍົນສຳລັບການຂັບເຄື່ອນຮ່ວມ, ການເຄື່ອນໄຫວຂອງແຂນຫຸ່ນຍົນ, ແລະ ຕຳແໜ່ງທີ່ມີຄວາມແມ່ນຍຳ. ມໍເຕີເຫຼົ່ານີ້ມີລັກສະນະໂດຍແຮງບິດສູງ, ຄວາມລະອຽດສູງ ແລະ ສຽງດັງຕ່ຳ ເພື່ອຕອບສະໜອງຄວາມຕ້ອງການການເຄື່ອນໄຫວ ແລະ ການຄວບຄຸມທີ່ມີຄວາມແມ່ນຍຳໃນການນຳໃຊ້ຫຸ່ນຍົນ.
ອຸປະກອນເລເຊີ:ມໍເຕີສະກູບານປະສົມຂະໜາດ 57 ມມ ສາມາດໃຊ້ໃນອຸປະກອນເລເຊີສຳລັບວຽກງານຕ່າງໆເຊັ່ນ: ການປັບໂຟກັດ, ໂຕະການເລື່ອນ, ແລະ ການຄວບຄຸມເສັ້ນທາງແສງ. ການຄວບຄຸມຕຳແໜ່ງ ແລະ ຄວາມໝັ້ນຄົງທີ່ມີຄວາມແມ່ນຍຳສູງຊ່ວຍໃຫ້ມັນສາມາດຮັບຮູ້ການໂຟກັດ ແລະ ຕຳແໜ່ງຂອງລຳແສງເລເຊີໄດ້ຢ່າງແນ່ນອນ.
ເຄື່ອງມືວິເຄາະ:ໃນເຄື່ອງມືວິເຄາະໃນຫ້ອງທົດລອງປະເພດຕ່າງໆ, ມໍເຕີສະກູບານປະສົມ 57 ມມ ສາມາດໃຊ້ໃນການປະມວນຜົນຕົວຢ່າງອັດຕະໂນມັດ, ລະບົບການໃຫ້ອາຫານຕົວຢ່າງ, ໂຄຣມາໂຕກຣາຟິກຂອງແຫຼວ, ໂຄຣມາໂຕກຣາຟິກອາຍແກັສ, ແລະອື່ນໆ. ການເຄື່ອນໄຫວທີ່ມີຄວາມແມ່ນຍໍາສູງ ແລະ ປະສິດທິພາບທີ່ໝັ້ນຄົງຂອງມໍເຕີເຫຼົ່ານີ້ມີບົດບາດສໍາຄັນໃນການປັບປຸງຄວາມຖືກຕ້ອງ ແລະ ປະສິດທິພາບຂອງການວິເຄາະໃນຫ້ອງທົດລອງ.
ອຸປະກອນການຜະລິດແບບເຄິ່ງຕົວນຳ ແລະ ເອເລັກໂຕຣນິກ:ມໍເຕີສະເຕັບບານປະສົມຂະໜາດ 57 ມມ ຖືກໃຊ້ສຳລັບການວາງຕຳແໜ່ງ ແລະ ການຄວບຄຸມອັດຕະໂນມັດຢ່າງແມ່ນຍຳໃນອຸປະກອນການຜະລິດເຄິ່ງຕົວນຳ ແລະ ເອເລັກໂຕຣນິກ. ຕົວຢ່າງ, ພວກມັນສາມາດໃຊ້ໃນອຸປະກອນທົດສອບຊິບເຄິ່ງຕົວນຳ, ເຄື່ອງຈັກຫຸ້ມຫໍ່, ເທັກໂນໂລຢີຕິດຕັ້ງໜ້າດິນ, ການຜະລິດກະດານວົງຈອນພິມ ແລະ ຂົງເຂດອື່ນໆເພື່ອໃຫ້ການຄວບຄຸມການເຄື່ອນໄຫວທີ່ມີຄວາມໄວສູງ, ຄວາມແມ່ນຍຳສູງ ແລະ ໜ້າເຊື່ອຖື.
ອຸປະກອນອັດຕະໂນມັດທີ່ບໍ່ໄດ້ມາດຕະຖານ ແລະ ອຸປະກອນອັດຕະໂນມັດປະເພດຕ່າງໆ:ມໍເຕີສະເຕັບບານປະສົມ 57 ມມ ແມ່ນເໝາະສົມກັບອຸປະກອນອັດຕະໂນມັດທີ່ບໍ່ໄດ້ມາດຕະຖານ ແລະ ສາຍການຜະລິດອັດຕະໂນມັດຫຼາກຫຼາຍຊະນິດ. ພວກມັນສາມາດນໍາໃຊ້ໃນອຸປະກອນກໍານົດຕໍາແຫນ່ງ, ລະບົບປະກອບອັດຕະໂນມັດ, ອຸປະກອນຫຸ້ມຫໍ່, ເຄື່ອງຈັກພິມ, ອຸປະກອນແຜ່ນແພ, ແລະອື່ນໆ. ພວກມັນໃຫ້ການຄວບຄຸມຕໍາແຫນ່ງທີ່ຊັດເຈນ ແລະ ປະສິດທິພາບການເຄື່ອນໄຫວທີ່ໜ້າເຊື່ອຖືເພື່ອຕອບສະໜອງຄວາມຕ້ອງການອັດຕະໂນມັດໃນຂົງເຂດຕ່າງໆ.
ຂໍ້ໄດ້ປຽບ
ອັດຕາສ່ວນແຮງບິດຕໍ່ຄວາມเฉื่อยສູງ:ມໍເຕີສະເຕບເປີບານສະກູປະສົມມີອັດຕາສ່ວນແຮງບິດຕໍ່ຄວາມเฉื่อยສູງ, ຊຶ່ງໝາຍຄວາມວ່າພວກມັນສາມາດສົ່ງແຮງບິດໄດ້ຫຼາຍເມື່ອທຽບກັບຂະໜາດ ແລະ ນ້ຳໜັກຂອງມັນ. ສິ່ງນີ້ເຮັດໃຫ້ພວກມັນເໝາະສຳລັບການນຳໃຊ້ທີ່ຕ້ອງການແຮງບິດສູງໃນຮູບແບບກະທັດຮັດ, ເຊັ່ນ: ຫຸ່ນຍົນ, ເຄື່ອງຈັກ CNC, ແລະ ລະບົບອັດຕະໂນມັດ.
ການເລັ່ງ ແລະ ການຫຼຸດຄວາມໄວສູງ:ມໍເຕີເຫຼົ່ານີ້ມີຄວາມສາມາດໃນການເລັ່ງ ແລະ ຫຼຸດຄວາມໄວໄດ້ໄວ, ຊ່ວຍໃຫ້ການເຄື່ອນໄຫວໄດ້ໄວ ແລະ ຊັດເຈນ. ຄວາມเฉื่อยຕ່ຳຂອງ rotor ແລະ ແຮງບິດທີ່ສູງຊ່ວຍໃຫ້ມໍເຕີຕອບສະໜອງຕໍ່ສັນຍານຄວບຄຸມໄດ້ໄວ, ເຊິ່ງເຮັດໃຫ້ເວລາເລີ່ມຕົ້ນ-ຢຸດໄວຂຶ້ນ ແລະ ປະສິດທິພາບໂດຍລວມຂອງລະບົບດີຂຶ້ນ.
ການກ້າວກະໂດດແບບລຽບງ່າຍ:ມໍເຕີສະເຕບເປີລູກບານສະກູປະສົມແມ່ນເໝາະສົມກັບການປະຕິບັດງານແບບໄມໂຄຣສະເຕບ, ເຊິ່ງຊ່ວຍໃຫ້ມີຄວາມລະອຽດທີ່ລະອຽດກວ່າ ແລະ ການຄວບຄຸມການເຄື່ອນໄຫວທີ່ລຽບງ່າຍກວ່າ. ໄມໂຄຣສະເຕບເປີແບ່ງແຕ່ລະຂັ້ນຕອນເຕັມອອກເປັນຂັ້ນຕອນຍ່ອຍຂະໜາດນ້ອຍກວ່າ, ຫຼຸດຜ່ອນຂະໜາດຂັ້ນຕອນ ແລະ ຫຼຸດຜ່ອນການສັ່ນສະເທືອນ, ສຽງລົບກວນ, ແລະ ຜົນກະທົບສະທ້ອນ. ຄຸນສົມບັດນີ້ມີປະໂຫຍດໂດຍສະເພາະໃນການນຳໃຊ້ທີ່ຕ້ອງການການເຄື່ອນໄຫວທີ່ລຽບງ່າຍ ແລະ ຊັດເຈນ, ເຊັ່ນ: ເຄື່ອງພິມ 3D ແລະ ລະບົບການກຳນົດຕຳແໜ່ງເສັ້ນຊື່.
ການຕໍ່ຕ້ານຕໍ່າ:ກົນໄກສະກູບານໃນມໍເຕີເຫຼົ່ານີ້ຊ່ວຍຫຼຸດຜ່ອນການຖອຍຫລັງ, ເຊິ່ງແມ່ນການຫຼິ້ນ ຫຼື ໄລຍະຫ່າງລະຫວ່າງໂຣເຕີ ແລະ ການໂຫຼດ. ການຖອຍຫລັງຕໍ່າຮັບປະກັນການວາງຕຳແໜ່ງທີ່ຖືກຕ້ອງ ແລະ ການເຮັດຊ້ຳ, ຍ້ອນວ່າມີການສູນເສຍການເຄື່ອນໄຫວໜ້ອຍທີ່ສຸດເມື່ອປ່ຽນທິດທາງ ຫຼື ການເຄື່ອນໄຫວຖອຍຫຼັງ. ນີ້ແມ່ນສິ່ງສຳຄັນສຳລັບການນຳໃຊ້ທີ່ຕ້ອງການການວາງຕຳແໜ່ງທີ່ຊັດເຈນ ແລະ ເຮັດຊ້ຳໄດ້, ເຊັ່ນ: ເຄື່ອງຈັກເລືອກ ແລະ ວາງ ແລະ ລະບົບແສງ.
ການຕອບສະໜອງແບບໄດນາມິກສູງ:ການປະສົມປະສານຂອງມໍເຕີສະເຕບເປີໄຮບຣິດ ແລະ ກົນໄກບານສະກູຊ່ວຍໃຫ້ມີການຕອບສະໜອງແບບໄດນາມິກສູງ, ຊຶ່ງໝາຍຄວາມວ່າມໍເຕີສາມາດຕິດຕາມການປ່ຽນແປງຂອງສັນຍານຄວບຄຸມໄດ້ຢ່າງວ່ອງໄວ ແລະ ຖືກຕ້ອງ. ການຕອບສະໜອງນີ້ແມ່ນສິ່ງຈຳເປັນສຳລັບການນຳໃຊ້ທີ່ກ່ຽວຂ້ອງກັບການປ່ຽນແປງຢ່າງໄວວາໃນຄວາມໄວ, ທິດທາງ ຫຼື ຕຳແໜ່ງ, ເຊັ່ນ: ເຄື່ອງຈັກຄວາມໄວສູງ ແລະ ລະບົບຄວບຄຸມການເຄື່ອນໄຫວແບບໄດນາມິກ.
ປະສິດທິພາບຄວາມຮ້ອນ:ມໍເຕີສະກູບານປະສົມໄດ້ຖືກອອກແບບໃຫ້ມີປະສິດທິພາບທາງຄວາມຮ້ອນທີ່ດີ, ຊ່ວຍໃຫ້ການລະບາຍຄວາມຮ້ອນມີປະສິດທິພາບໃນລະຫວ່າງການປະຕິບັດງານ. ສິ່ງນີ້ຊ່ວຍປ້ອງກັນການຮ້ອນເກີນໄປ ແລະ ຮັບປະກັນປະສິດທິພາບຂອງມໍເຕີທີ່ໝັ້ນຄົງ, ເຖິງແມ່ນວ່າໃນລະຫວ່າງການໃຊ້ງານທີ່ຍາວນານ ຫຼື ໃນການນຳໃຊ້ທີ່ຕ້ອງການຄວາມຕ້ອງການສູງ.
ວິທີແກ້ໄຂທີ່ມີປະສິດທິພາບດ້ານຕົ້ນທຶນ:ມໍເຕີສະເຕບເປີລູກສະກູປະສົມສະເໜີວິທີແກ້ໄຂທີ່ມີປະສິດທິພາບດ້ານຄ່າໃຊ້ຈ່າຍສຳລັບການນຳໃຊ້ທີ່ຕ້ອງການຄວາມແມ່ນຍຳສູງ ແລະ ແຮງບິດ. ເມື່ອປຽບທຽບກັບລະບົບມໍເຕີເຊີໂວທີ່ສັບສົນ ແລະ ມີລາຄາແພງກວ່າ, ມໍເຕີສະເຕບເປີປະສົມໃຫ້ຄວາມສົມດຸນລະຫວ່າງປະສິດທິພາບ, ລາຄາ ແລະ ຄວາມສະດວກໃນການນຳໃຊ້. ພວກມັນມັກຈະເປັນທາງເລືອກທີ່ຕ້ອງການສຳລັບການນຳໃຊ້ທີ່ລາຄາເປັນປັດໄຈສຳຄັນ, ໂດຍບໍ່ມີການປະນີປະນອມຄຸນນະພາບ ແລະ ປະສິດທິພາບ.
ຂໍ້ກຳນົດໃນການເລືອກມໍເຕີ:
►ທິດທາງການເຄື່ອນໄຫວ/ການຕິດຕັ້ງ
►ຄວາມຕ້ອງການການໂຫຼດ
► ຂໍ້ກຳນົດກ່ຽວກັບພະຍາດເສັ້ນເລືອດໃນສະໝອງຕີບ
► ຄວາມຕ້ອງການດ້ານເຄື່ອງຈັກ
►ຄວາມຕ້ອງການຄວາມແມ່ນຍໍາ
►ຄວາມຕ້ອງການຄຳຕິຊົມຂອງຕົວເຂົ້າລະຫັດ
► ຂໍ້ກຳນົດການປັບດ້ວຍຕົນເອງ
► ຂໍ້ກຳນົດດ້ານສິ່ງແວດລ້ອມ
ກອງປະຊຸມຜະລິດ






