




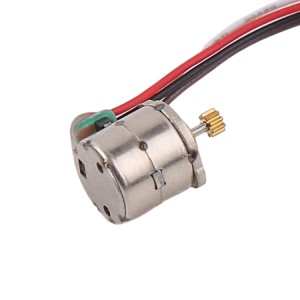
ມໍເຕີສະເຕບເປີຂະໜາດນ້ອຍ 10BY ຂະໜາດ 5v ເສັ້ນຜ່າສູນກາງ 10 ມມ
ລາຍລະອຽດ
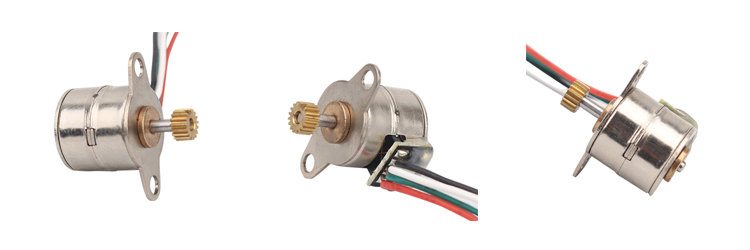
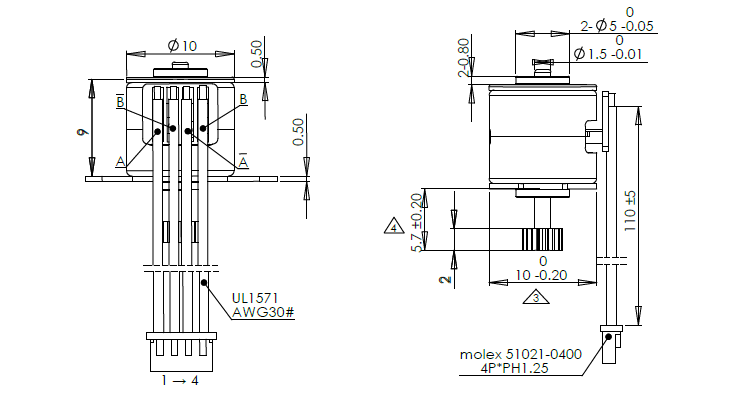
VSM1070 ເປັນມໍເຕີສະເຕັບບິ້ງຂະໜາດນ້ອຍທີ່ມີຄຸນນະພາບສູງ ແລະ ມີສຽງລົບກວນຕ່ຳ. ເສັ້ນຜ່າສູນກາງມໍເຕີແມ່ນ 10 ມມ, ຄວາມສູງຂອງມໍເຕີແມ່ນ 10 ມມ, ໄລຍະຫ່າງລະຫວ່າງຮູຕິດຕັ້ງຫູມໍເຕີແມ່ນ 14 ມມ, ແລະ ຄວາມສູງຂອງເພົາອອກແມ່ນ 5.7 ມມ. ຄວາມສູງຂອງເພົາອອກຂອງມໍເຕີສາມາດປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການຕິດຕັ້ງຂອງລູກຄ້າ. ເພົາອອກຂອງມໍເຕີທຳມະດາມີເກຍທອງແດງ (ໂມດູນເກຍ 0.2, ຈຳນວນແຂ້ວ 17, ແລະ ຄວາມໜາຂອງເກຍ 2 ມມ). ເກຍຍັງສາມາດປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການຕິດຕັ້ງຂອງລູກຄ້າ.
ຮູບແບບການເຊື່ອມຕໍ່ຂອງມໍເຕີແມ່ນສາຍເຊື່ອມຕໍ່, ຫຼືເຂັມເປົ່າ, FPC, ແລະອື່ນໆສາມາດປັບແຕ່ງໄດ້
ເນື່ອງຈາກຂະໜາດນ້ອຍ, ຄວາມແມ່ນຍໍາສູງ, ການຄວບຄຸມງ່າຍ ແລະ ຄຸນລັກສະນະທີ່ດີເລີດອື່ນໆ, ມໍເຕີສະປີດຂະໜາດນ້ອຍນີ້ຈຶ່ງຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນກ້ອງຖ່າຍຮູບ, ເຄື່ອງມືທາງດ້ານແສງ, ເລນ, ອຸປະກອນການແພດທີ່ມີຄວາມແມ່ນຍໍາສູງ, ແລະ ຂົງເຂດອື່ນໆ.
ພາລາມິເຕີ
| ຊື່ຜະລິດຕະພັນ | ມໍເຕີສະເຕບເປີ 10 ມມ |
| ຮຸ່ນ | VSM1070 |
| ຄວາມຖີ່ເລີ່ມຕົ້ນສູງສຸດ | 800 PPS ຕໍ່າສຸດ (ທີ່ 5.0 V DC) |
| ຄວາມຖີ່ສູງສຸດຂອງການໝຸນ | 1100 PPS ຕໍ່າສຸດ (ທີ່ 5.0 V DC) |
| ແຮງບິດດຶງເຂົ້າ | ຕໍ່າສຸດ 5.4 gf-cm (ທີ່ 500 PPS, 5.0 V DC) |
| ແຮງບິດດຶງອອກ | ຕໍ່າສຸດ 6.0 gf-cm (ທີ່ 500 PPS, 5.0 V DC) |
| ຊັ້ນປ້ອງກັນຄວາມຮ້ອນ | ຊັ້ນ E ສຳລັບຂົດລວດ |
| ຄວາມແຂງແຮງຂອງການສນວນກັນຄວາມຮ້ອນ | 100 V AC ເປັນເວລາໜຶ່ງວິນາທີ |
| ຄວາມຕ້ານທານການສນວນ | 1 MΩ (DC 100 V) |
| ຊ່ວງອຸນຫະພູມປະຕິບັດການ | -10 ~+60 ℃ |
| ບໍລິການ OEM ແລະ ODM | ມີໃຫ້ບໍລິການ |
ຮູບແຕ້ມການອອກແບບ
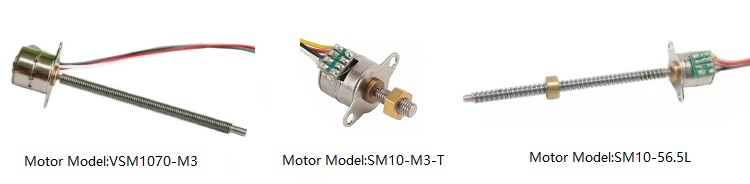
ຕົວຢ່າງຂອງປະເພດດຽວກັນ
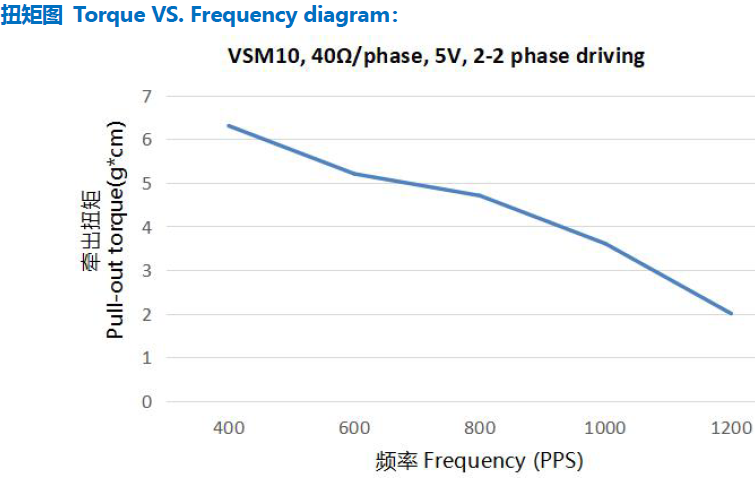
ກ່ຽວກັບແຜນວາດແຮງບິດຂອງມໍເຕີ stepper ຂະໜາດນ້ອຍ
ຄໍາຮ້ອງສະຫມັກກ່ຽວກັບມໍເຕີ stepper ໄມໂຄຣ
ໂດຍທົ່ວໄປແລ້ວ ມໍເຕີສະເຕບເປີຂະໜາດນ້ອຍຂອງພວກເຮົາມີມຸມສະເຕບ 18 ອົງສາ. (ການຂັບເຄື່ອນແບບສະເຕບເຕັມຮູບແບບ).
ນັ້ນໝາຍຄວາມວ່າຕ້ອງໃຊ້ເວລາ 20 ຂັ້ນຕອນເພື່ອໝຸນຮອບໜຶ່ງຮອບ.
ມຸມຂອງຂັ້ນຕອນຂອງມໍເຕີແມ່ນກ່ຽວຂ້ອງກັບການອອກແບບຂອງສະເຕເຕີພາຍໃນ.
ພວກເຮົາມີມໍເຕີສະເຕບເປີຂະໜາດນ້ອຍທີ່ມີເສັ້ນຜ່າສູນກາງແຕກຕ່າງກັນ, ແລະແຮງບິດຂອງມໍເຕີແມ່ນກ່ຽວຂ້ອງກັບຂະໜາດຂອງມັນ.
ນີ້ແມ່ນຄວາມສຳພັນລະຫວ່າງເສັ້ນຜ່າສູນກາງຂອງມໍເຕີ ແລະ ແຮງບິດ (ດ້ວຍຄວາມຖີ່ໃນການແລ່ນທີ່ເໝາະສົມ, ທີ່ແຮງດັນທີ່ຖືກກຳນົດ):
ມໍເຕີ 6 ມມ: ປະມານ 1 g*cm
ມໍເຕີ 8 ມມ: ປະມານ 3g * ຊມ
ມໍເຕີ 10 ມມ: ປະມານ 5 g*cm
ມໍເຕີ 15 ມມ: ປະມານ 15 g*cm
ມໍເຕີ 20 ມມ: ປະມານ 40 ກຣາມ * ຊມ
ແອັບພລິເຄຊັນ
ຄວາມໄວຂອງມໍເຕີຖືກກຳນົດໂດຍຄວາມຖີ່ຂອງການຂັບເຄື່ອນ, ແລະມັນບໍ່ມີຫຍັງກ່ຽວຂ້ອງກັບການໂຫຼດ (ເວັ້ນເສຍແຕ່ວ່າມັນສູນເສຍຂັ້ນຕອນ).
ເນື່ອງຈາກການຄວບຄຸມຄວາມໄວຂອງມໍເຕີສະເຕບເປີທີ່ມີຄວາມແມ່ນຍໍາສູງ, ດ້ວຍການເຄື່ອນທີ່ທີ່ຄວບຄຸມໂດຍຄົນຂັບ, ທ່ານສາມາດບັນລຸການວາງຕຳແໜ່ງ ແລະ ການຄວບຄຸມຄວາມໄວໄດ້ຢ່າງແມ່ນຍໍາສູງ. ດ້ວຍເຫດຜົນນີ້, ມໍເຕີສະເຕບເປີແມ່ນມໍເຕີທີ່ເລືອກສໍາລັບການນໍາໃຊ້ການຄວບຄຸມການເຄື່ອນໄຫວທີ່ມີຄວາມແມ່ນຍໍາຫຼາຍຢ່າງ.
ບໍລິການປັບແຕ່ງ
ການອອກແບບມໍເຕີສາມາດປັບໄດ້ຕາມຄວາມຕ້ອງການຂອງລູກຄ້າລວມທັງ:
ເສັ້ນຜ່າສູນກາງຂອງມໍເຕີ: ພວກເຮົາມີມໍເຕີເສັ້ນຜ່າສູນກາງ 6 ມມ, 8 ມມ, 10 ມມ, 15 ມມ ແລະ 20 ມມ
ຄວາມຕ້ານທານຂອງຂົດລວດ/ແຮງດັນໄຟຟ້າທີ່ກຳນົດໄວ້: ຄວາມຕ້ານທານຂອງຂົດລວດສາມາດປັບໄດ້, ແລະ ດ້ວຍຄວາມຕ້ານທານທີ່ສູງຂຶ້ນ, ແຮງດັນໄຟຟ້າທີ່ກຳນົດໄວ້ຂອງມໍເຕີຈະສູງຂຶ້ນ.
ການອອກແບບວົງເລັບ/ຄວາມຍາວຂອງສະກູນຳ: ຖ້າລູກຄ້າຕ້ອງການໃຫ້ວົງເລັບຍາວ/ສັ້ນ, ດ້ວຍການອອກແບບພິເສດເຊັ່ນ: ຮູຕິດຕັ້ງ, ມັນສາມາດປັບໄດ້.
PCB + ສາຍ + ຕົວເຊື່ອມຕໍ່: ການອອກແບບຂອງ PCB, ຄວາມຍາວຂອງສາຍ ແລະ ຄວາມສູງຂອງຕົວເຊື່ອມຕໍ່ສາມາດປັບໄດ້ທັງໝົດ, ພວກມັນສາມາດປ່ຽນເປັນ FPC ໄດ້ຖ້າລູກຄ້າຕ້ອງການ.
ເວລານຳ ແລະ ຂໍ້ມູນການຫຸ້ມຫໍ່
ເວລານຳສຳລັບຕົວຢ່າງ:
ມໍເຕີມາດຕະຖານທີ່ມີຢູ່ໃນສະຕັອກ: ພາຍໃນ 3 ມື້
ມໍເຕີມາດຕະຖານບໍ່ມີຢູ່ໃນສະຕັອກ: ພາຍໃນ 15 ມື້
ຜະລິດຕະພັນທີ່ກຳນົດເອງ: ປະມານ 25 ~ 30 ມື້ (ອີງຕາມຄວາມສັບສົນຂອງການປັບແຕ່ງ)
ເວລານຳສຳລັບການສ້າງແມ່ພິມໃໝ່: ໂດຍທົ່ວໄປປະມານ 45 ມື້
ເວລານຳສຳລັບການຜະລິດຈຳນວນຫຼາຍ: ອີງຕາມປະລິມານການສັ່ງຊື້
ການຫຸ້ມຫໍ່:
ຕົວຢ່າງຖືກບັນຈຸໃນຟອງນໍ້າໂຟມພ້ອມດ້ວຍກ່ອງເຈ້ຍ, ສົ່ງໂດຍດ່ວນ
ການຜະລິດຈຳນວນຫຼາຍ, ມໍເຕີຖືກບັນຈຸໃນກ່ອງລູກຟູກທີ່ມີຟິມໂປ່ງໃສຢູ່ດ້ານນອກ. (ຂົນສົ່ງທາງອາກາດ)
ຖ້າສົ່ງທາງທະເລ, ຜະລິດຕະພັນຈະຖືກຫຸ້ມຫໍ່ໃສ່ພາເລັດ

ວິທີການຂົນສົ່ງ
ກ່ຽວກັບຕົວຢ່າງ ແລະ ການຂົນສົ່ງທາງອາກາດ, ພວກເຮົາໃຊ້ Fedex/TNT/UPS/DHL.(5~12 ມື້ສຳລັບການບໍລິການດ່ວນ)
ສຳລັບການຂົນສົ່ງທາງທະເລ, ພວກເຮົາໃຊ້ຕົວແທນຂົນສົ່ງຂອງພວກເຮົາ, ແລະສົ່ງຈາກທ່າເຮືອຊຽງໄຮ.(45~70 ມື້ສຳລັບການຂົນສົ່ງທາງທະເລ)
ຄຳຖາມທີ່ຖືກຖາມເລື້ອຍໆ
ຄຳຖາມທີ່ຖືກຖາມເລື້ອຍໆ
1. ມໍເຕີສະເຕບເປີບວກກັບລະບົບຫຼຸດຄວາມໄວຂອງເກຍ:
ມໍເຕີສະເຕບເປີທີ່ມີກ່ອງເກຍຫຼຸດຄວາມໄວໃຊ້ຮ່ວມກັນ, ຜົນຜະລິດຂອງມໍເຕີສະເຕບເປີມີຄວາມໄວສູງ, ແຮງບິດຕ່ຳ, ເຊື່ອມຕໍ່ກັບກ່ອງເກຍຫຼຸດຄວາມໄວ, ກ່ອງເກຍມີຊຸດເກຍຫຼຸດຄວາມໄວພາຍໃນລະບົບສົ່ງກຳລັງທີ່ປະກອບດ້ວຍອັດຕາສ່ວນການຫຼຸດຜ່ອນ, ຜົນຜະລິດຂອງມໍເຕີສະເຕບເປີມີຄວາມໄວສູງຫຼຸດລົງ, ແຕ່ຍັງຊ່ວຍເພີ່ມແຮງບິດຂອງລະບົບສົ່ງກຳລັງ, ເພື່ອໃຫ້ບັນລຸຜົນກະທົບການສົ່ງກຳລັງທີ່ເໝາະສົມ; ຜົນກະທົບການຫຼຸດຜ່ອນແມ່ນຂຶ້ນກັບອັດຕາສ່ວນການຫຼຸດຜ່ອນຂອງກ່ອງເກຍ, ອັດຕາສ່ວນການຫຼຸດຜ່ອນທີ່ສູງກວ່າ, ຄວາມໄວຂອງຜົນຜະລິດຈະນ້ອຍລົງ, ແລະໃນທາງກັບກັນ.
2. ມໍເຕີສະເຕບເປີວິທີການໃຊ້ຄວາມໄວຄວບຄຸມເສັ້ນໂຄ້ງ?
ເສັ້ນໂຄ້ງເລກກຳລັງ, ໃນການຂຽນໂປຣແກຣມຊອບແວ, ຄ່າຄົງທີ່ເວລາທີ່ຄິດໄລ່ທຳອິດຖືກເກັບໄວ້ໃນໜ່ວຍຄວາມຈຳຄອມພິວເຕີ, ວຽກງານຊີ້ໄປທີ່ການເລືອກ. ໂດຍປົກກະຕິແລ້ວ, ເວລາເລັ່ງ ແລະ ເວລາຫຼຸດຄວາມໄວເພື່ອໃຫ້ມໍເຕີສະເຕັບເປີສຳເລັດແມ່ນ 300ms ຫຼືຫຼາຍກວ່ານັ້ນ. ຖ້າທ່ານໃຊ້ເວລາເລັ່ງ ແລະ ເວລາຫຼຸດຄວາມໄວສັ້ນເກີນໄປ, ສຳລັບມໍເຕີສະເຕັບເປີສ່ວນໃຫຍ່, ມັນຈະຍາກທີ່ຈະບັນລຸການໝຸນຄວາມໄວສູງຂອງມໍເຕີສະເຕັບເປີ.
3. ຂອບເຂດທີ່ສົມເຫດສົມຜົນຂອງການຜະລິດຄວາມຮ້ອນຂອງມໍເຕີ stepper:
ຂອບເຂດທີ່ການຜະລິດຄວາມຮ້ອນຂອງມໍເຕີໄດ້ຮັບອະນຸຍາດແມ່ນຂຶ້ນກັບລະດັບການກັນຄວາມຮ້ອນພາຍໃນຂອງມໍເຕີ. ການກັນຄວາມຮ້ອນພາຍໃນຈະຖືກທຳລາຍພຽງແຕ່ໃນອຸນຫະພູມສູງ (ສູງກວ່າ 130 ອົງສາ). ດັ່ງນັ້ນຕາບໃດທີ່ອຸນຫະພູມພາຍໃນບໍ່ເກີນ 130 ອົງສາ, ມໍເຕີຈະບໍ່ທຳລາຍວົງແຫວນ, ແລະອຸນຫະພູມພື້ນຜິວຈະຕໍ່າກວ່າ 90 ອົງສາໃນຈຸດນັ້ນ. ດັ່ງນັ້ນ, ອຸນຫະພູມພື້ນຜິວຂອງມໍເຕີສະເຕບເປີໃນ 70-80 ອົງສາແມ່ນປົກກະຕິ. ວິທີການວັດແທກອຸນຫະພູມງ່າຍໆແມ່ນເຄື່ອງວັດແທກອຸນຫະພູມຈຸດທີ່ເປັນປະໂຫຍດ, ທ່ານຍັງສາມາດກຳນົດໄດ້ປະມານ: ດ້ວຍມືສາມາດແຕະຫຼາຍກວ່າ 1-2 ວິນາທີ, ບໍ່ເກີນ 60 ອົງສາ; ດ້ວຍມືສາມາດແຕະໄດ້ພຽງແຕ່ປະມານ 70-80 ອົງສາ; ນ້ຳສອງສາມຢົດລະເຫີຍໄວ, ມັນຫຼາຍກວ່າ 90 ອົງສາ
ສົ່ງຂໍ້ຄວາມຂອງທ່ານຫາພວກເຮົາ:
ໝວດໝູ່ຜະລິດຕະພັນ
-
ມໍເຕີ Stepper Mini Micro 8mm 2 ເຟດ 18 ອົງສາ ...
-

ມໍເຕີ steppr ຂະໜາດ 15 ນິ້ວ 2 ເຟສ 4 ສາຍ 18 ອົງສາ...
-

ມໍເຕີ stepper Micro 20 ມມ ສາມາດໄດ້ຮັບການຈັບຄູ່ກັບ g ...
-

ມໍເຕີ stepper Micro 35 ມມ ແຮງບິດສູງສຳລັບເຄື່ອງພິມ
-

ມໍເຕີສະເຕບເປີ 12V ແມ່ເຫຼັກຖາວອນ 20 ມມ ສຳລັບ...
-

ສຽງຕ່ໍາຄຸນນະພາບສູງ 3.3V 6mm ຈຸລະພາກ stepper m ...